SALP: Salp-inspired Approach to Low-Energy Propulsion
Jet propulsion is a locomotion mode commonly found in biological swimmers, including cephalopods and tunicates such as squids, cuttlefish, and salps. We are developing a soft salp-inspired robotic system to study mechanisms that produce greater locomotion agility and energetic efficiency.
Salps are barrel-shaped marine invertebrates that swim via jet propulsion. They move forward by rapidly changing the volumes of their body cavity, drawing water into their muscular mantle cavity through the front aperture, and then expelling it under high pressure through the rear funnel. We aim to leverage the unique biomechanics of salps to inform the development of energy-efficient, maneuverable underwater robots capable of environmental sensing in complex marine environments.
Salps can swim either as solitary jet-propelled individuals or while physically connected in a multi-jet colony, commonly known as a “salp chain”. Inspired by salps, we develop the SALP (Salp-inspired Approach to Low-energy Propulsion) robot, a soft underwater robot that swims via jet propulsion similarly to a biological salp.
Version 1: Origami Swimmer
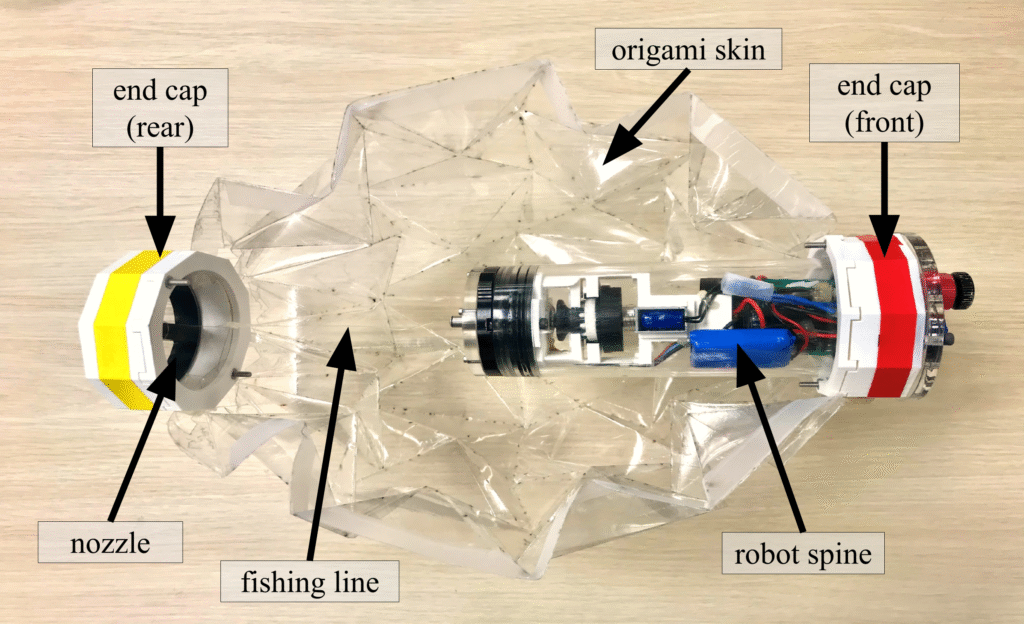
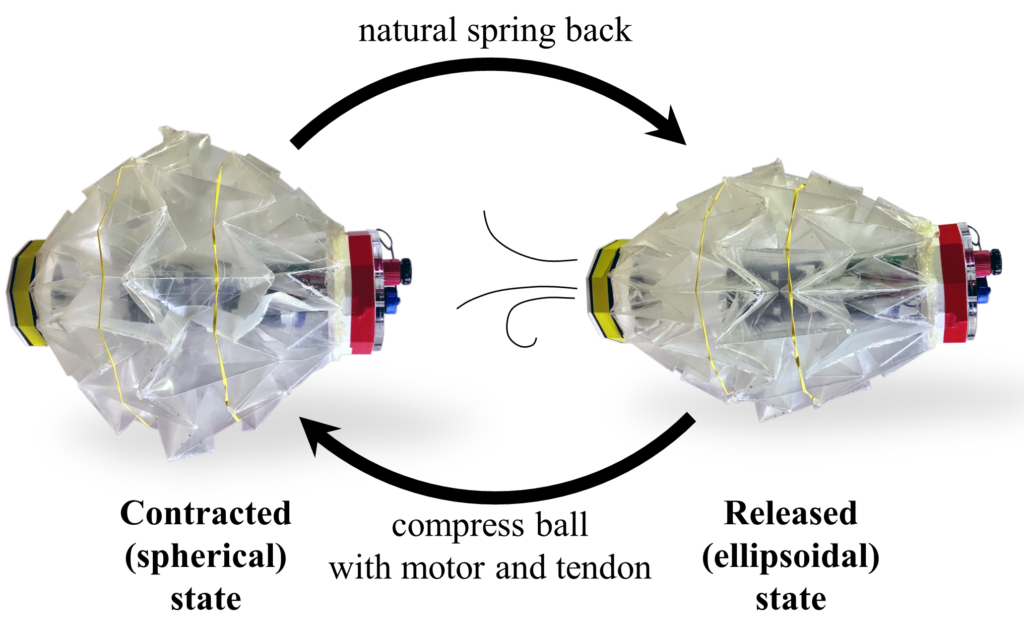
Traditional soft robots use flexible materials for shape change but require complex fabrication. To simplify this, we used an origami-inspired design, which allows the robot to fold from flat sheets into 3D shapes, making it easier to store, transport, and assemble in just a few hours. The robot mimics squid locomotion using the origami magic ball pattern, which transforms between an ellipsoid and a sphere. This enables it to expand and contract, pulling in and expelling water to create a jet for propulsion. A tendon mechanism in its spine controls its length. Ongoing effects focus on evaluating different configurations’ effect (e.g. adding a front nozzle) on the performance of the robot and understanding the underlying dynamics of it.
Mechanism demo
Robot swimming
Version 2: Multi-Robot SALP Robot Platform for Long-Term Distributed Sensing
We have optimized the jetting robot design to enable higher thrust and lower drag. The SALP robot is now modular in the sense that the robots can be manually attached to each other in different physical arrangements to study the effect of multi-robot interactions on locomotion performance. Physically connected SALP chains coordinate their jets to achieve various propulsion modes. We are interested in investigating how physical arrangement and jet coordination between two robots affect the swimming performance and energy efficiency of a two-SALP robotic system. We aim to gain insights into the potential hydrodynamic benefits of multi-jet propulsion by exploring how different coordination strategies influence the surrounding flow environment.
Leveraging Fluid-Structure Interactions for Efficient Control in Geophysical Flows
Micro-vehicles are cost-effective platforms for robotics and automation, excelling in maneuverability and adaptability in diverse environments. However, their lightweight and limited computational capacity pose control challenges. Using our underwater platform, we aim to understand fluid-structure interactions to enhance design and control, resulting in more efficient micro-vehicles with extended lifespans. This effort is a collaborative project focusing on fluid dynamics, control theory, and reconfiguration planning. The project aims to leverage environmental forces for power efficiency, investigating morphological adaptations and passive transport properties. It seeks to synthesize motion control strategies considering inertial effects and fluid-structure interactions while exploring efficiency trade-offs. Ultimately, it aims to enhance micro-autonomous vehicles’ capabilities for long-term operations and future large-scale deploy.
@conference{yang2025salp,
title = {Effect of Jet Coordination on Underwater Propulsion with the Multi-Robot SALP System},
author = {Zhiyuan Yang and Yipeng Zhang and Matthew Herbert and M. Ani Hsieh and Cynthia Sung},
url = {https://www.youtube.com/watch?v=mzd1QCXssCk
https://repository.upenn.edu/handle/20.500.14332/61048},
year = {2025},
date = {2025-04-23},
urldate = {2025-04-23},
booktitle = {8th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2025)},
abstract = {Salps, marine invertebrates known for their collective swimming through coordinated jet propulsion, offer a unique model for efficient underwater movement. Inspired by this biological system, we develop the SALP (Salp-inspired Approach to Low-energy Propulsion) robot, a soft underwater robot that swims via jet propulsion similarly to a biological salp. The SALPs can be physically connected into SALP chains and coordinate their jets to achieve various propulsion modes. In our experiments, we compare the swimming performance of the individual SALP with the two-SALP system, focusing on power, acceleration, velocity, and energy efficiency. Results indicate that two SALPs swimming synchronously exhibit a 9.0% increase in steady-state velocity and a 16.6% improvement in transient acceleration compared to a single SALP. Additionally, our analysis of swimming efficiency implies that asynchronous swimming is potentially more energy efficient than the synchronous mode, as reflected by a decrease in the cost of transport (COT).},
keywords = {},
pubstate = {forthcoming},
tppubtype = {conference}
}
Salps, marine invertebrates known for their collective swimming through coordinated jet propulsion, offer a unique model for efficient underwater movement. Inspired by this biological system, we develop the SALP (Salp-inspired Approach to Low-energy Propulsion) robot, a soft underwater robot that swims via jet propulsion similarly to a biological salp. The SALPs can be physically connected into SALP chains and coordinate their jets to achieve various propulsion modes. In our experiments, we compare the swimming performance of the individual SALP with the two-SALP system, focusing on power, acceleration, velocity, and energy efficiency. Results indicate that two SALPs swimming synchronously exhibit a 9.0% increase in steady-state velocity and a 16.6% improvement in transient acceleration compared to a single SALP. Additionally, our analysis of swimming efficiency implies that asynchronous swimming is potentially more energy efficient than the synchronous mode, as reflected by a decrease in the cost of transport (COT).
Drag coefficient characterization of the origami magic ball (Proceedings Article)
In: ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), pp. DETC2023-117182, 2023.
@inproceedings{chen2023drag,
title = {Drag coefficient characterization of the origami magic ball},
author = {Guanyu Chen and Dongsheng Chen and Jessica Weakly and Cynthia Sung},
url = {https://repository.upenn.edu/grasp_papers/73},
doi = {10.1115/DETC2023-117182},
year = {2023},
date = {2023-08-29},
urldate = {2023-08-29},
booktitle = {ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE)},
pages = {DETC2023-117182},
abstract = {The drag coefficient plays a vital role in the design and optimization of robots that move through fluids. From aircraft to underwater vehicles, their geometries are specially engineered so that the drag coefficients are as low as possible to achieve energy-efficient performances. Origami magic balls are 3-dimensional reconfigurable geometries composed of repeated simple waterbomb units. Their volumes can change as their geometries vary and we have used this concept in a recent underwater robot design. This paper characterizes the drag coefficient of an origami magic ball in a wind tunnel. Through dimensional analysis, the scenario where the robot swims underwater is equivalently transferred to the situation when it is in the wind tunnel. With experiments, we have collected and analyzed the drag force data. It is concluded that the drag coefficient of the magic ball increases from around 0.64 to 1.26 as it transforms from a slim ellipsoidal shape to an oblate spherical shape. Additionally, three different magic balls produce increases in the drag coefficient of between 57% and 86% on average compared to the smooth geometries of the same size and aspect ratio. The results will be useful in future designs of robots using waterbomb origami in fluidic environments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The drag coefficient plays a vital role in the design and optimization of robots that move through fluids. From aircraft to underwater vehicles, their geometries are specially engineered so that the drag coefficients are as low as possible to achieve energy-efficient performances. Origami magic balls are 3-dimensional reconfigurable geometries composed of repeated simple waterbomb units. Their volumes can change as their geometries vary and we have used this concept in a recent underwater robot design. This paper characterizes the drag coefficient of an origami magic ball in a wind tunnel. Through dimensional analysis, the scenario where the robot swims underwater is equivalently transferred to the situation when it is in the wind tunnel. With experiments, we have collected and analyzed the drag force data. It is concluded that the drag coefficient of the magic ball increases from around 0.64 to 1.26 as it transforms from a slim ellipsoidal shape to an oblate spherical shape. Additionally, three different magic balls produce increases in the drag coefficient of between 57% and 86% on average compared to the smooth geometries of the same size and aspect ratio. The results will be useful in future designs of robots using waterbomb origami in fluidic environments.
@article{yang2021origami,
title = {Origami-inspired robot that swims via jet propulsion},
author = {Zhiyuan Yang and Dongsheng Chen and David J. Levine and Cynthia Sung},
url = {https://repository.upenn.edu/grasp_papers/68
https://youtu.be/cZ1nx_kOw3w},
doi = {10.1109/LRA.2021.3097757},
year = {2021},
date = {2021-07-19},
urldate = {2021-07-19},
booktitle = {IEEE Robotics and Automation Letters},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {4},
pages = {7145-7152},
abstract = {Underwater swimmers present unique opportunities for using bodily reconfiguration for self propulsion. Origami-inspired designs are low-cost, fast to fabricate, robust, and can be used to create compliant mechanisms useful in energy efficient underwater locomotion. In this paper, we demonstrate an origami-inspired robot that can change its body shape to ingest and expel water, creating a jet that propels it forward similarly to cephalopods. We use the magic ball origami pattern, which can transform between ellipsoidal (low volume) and spherical (high volume) shapes. A custom actuation mechanism contracts the robot to take in fluid, and the inherent mechanics of the magic ball returns the robot to its natural shape upon release. We describe the design and control of this robot and verify its locomotion in a water tank. The resulting robot is able to move forward at 6.7 cm/s (0.2 body lengths/s), with a cost of transport of 2.0. },
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Underwater swimmers present unique opportunities for using bodily reconfiguration for self propulsion. Origami-inspired designs are low-cost, fast to fabricate, robust, and can be used to create compliant mechanisms useful in energy efficient underwater locomotion. In this paper, we demonstrate an origami-inspired robot that can change its body shape to ingest and expel water, creating a jet that propels it forward similarly to cephalopods. We use the magic ball origami pattern, which can transform between ellipsoidal (low volume) and spherical (high volume) shapes. A custom actuation mechanism contracts the robot to take in fluid, and the inherent mechanics of the magic ball returns the robot to its natural shape upon release. We describe the design and control of this robot and verify its locomotion in a water tank. The resulting robot is able to move forward at 6.7 cm/s (0.2 body lengths/s), with a cost of transport of 2.0.
The project “Leveraging Fluid-Structure Interactions for Efficient Control in Geophysical Flows” is in collaboration with Ani Hsieh’s lab from University of Pennsylvania, Eric Forgoston’s lab from Montclair State University, and Philip Yecko’s lab from The Cooper Union.
These projects have been supported by the National Science Foundation (NSF) Grant No. 2121887 and the Office of Naval Research (ONR) award #N00014-23-1-2068. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of funding source.