Welcome to the Sung Robotics Lab!
Interested in joining the group? We actively recruit students from mechanical engineering, computer science, and electrical engineering. Refer to the info under Opportunities depending on your current status.
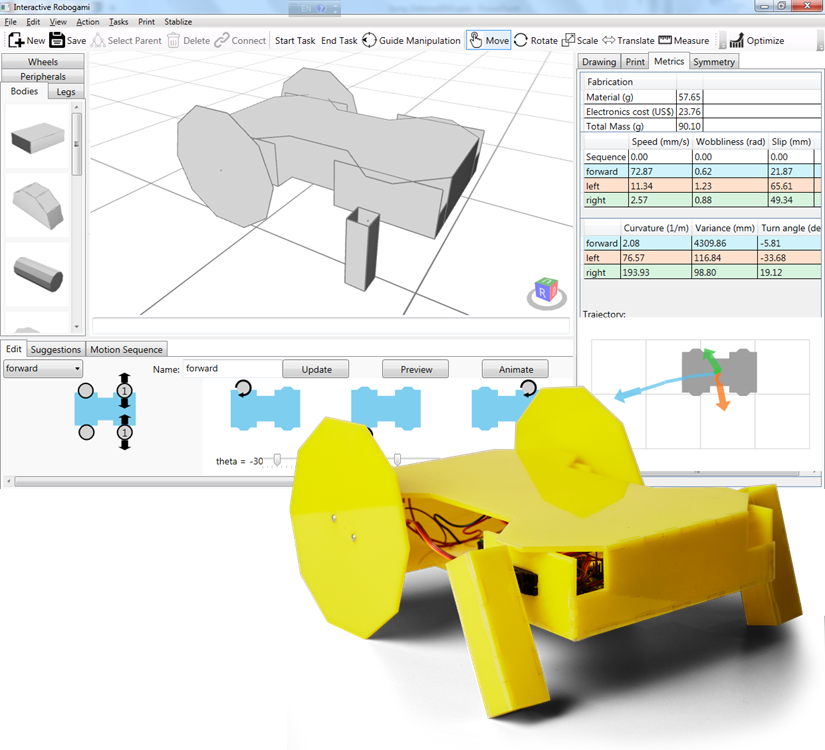
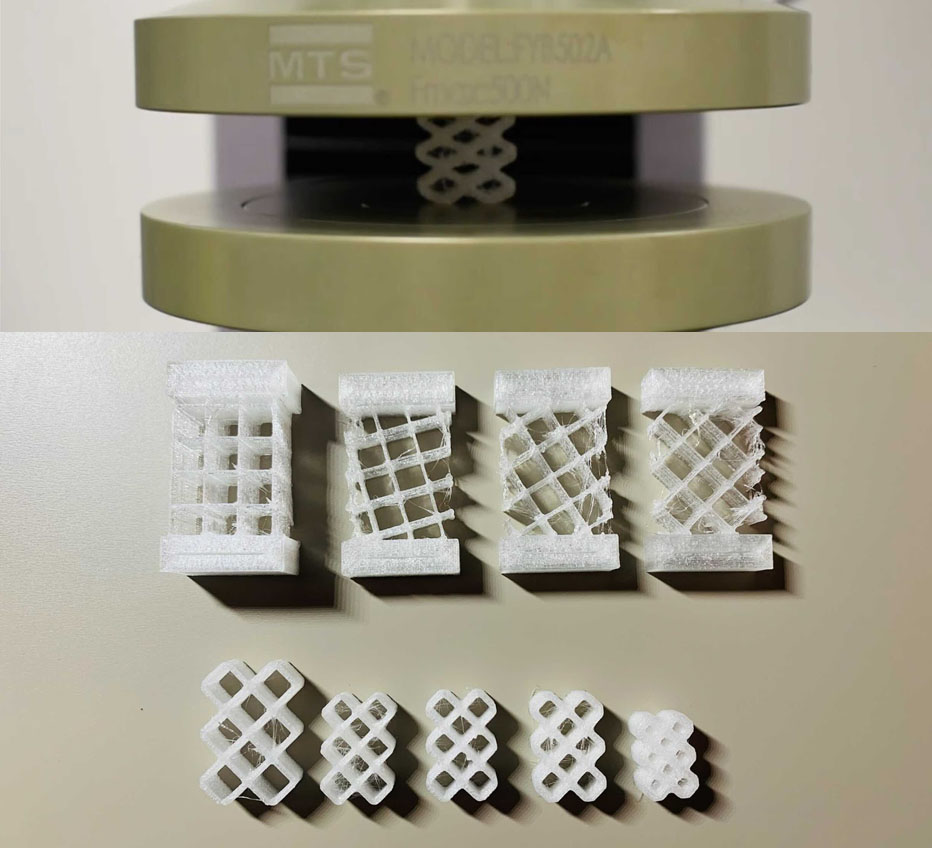
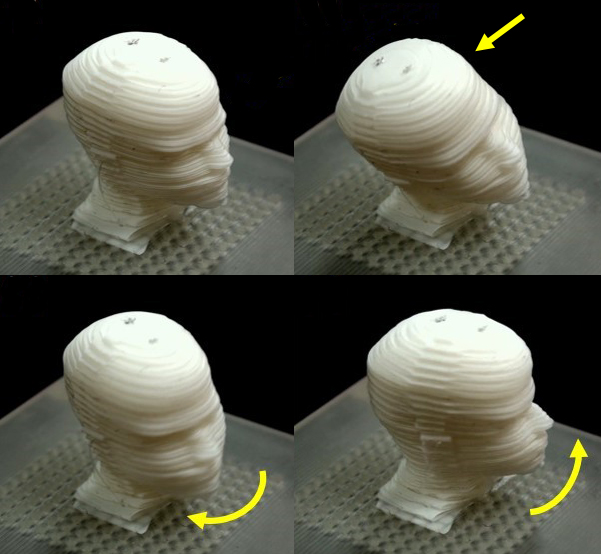
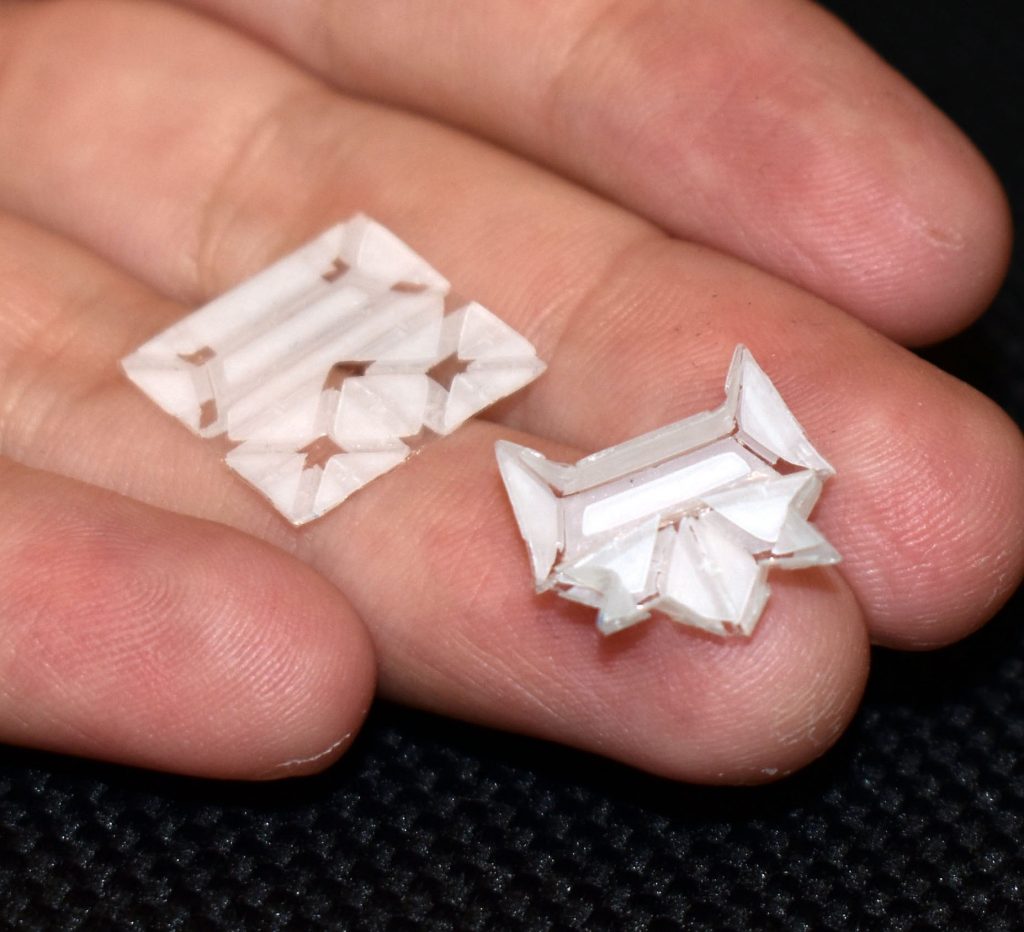
Our group is interested in advancing the state of the art in computational methods for robot design and deployment, with a particular focus on soft and compliant robots. By combining methods in computational geometry with practical engineering design, we develop theory and systems for making robot design and fabrication intuitive and accessible to the non-engineer. Our work lies at the intersection of four major areas:
We are a member of the Penn Engineering GRASP Lab and the Mechanical Engineering and Applied Mechanics Department at the University of Pennsylvania.
We are grateful for the support of the National Science Foundation, the Johnson & Johnson WiSTEM2D program, the Office of Naval Research, the Penn Health-Tech center, and the Penn Center for Undergraduate Research and Fellowships.
Latest News
- Cynthia Sung receives ARO Early Career Award
- Kinegami project featured in GRASP Lab News
- Wei-Hsi Chen’s Kinegami paper receives Honorable Mention for 2023 TRO Best Paper Award
- Three papers to be presented at RoboSoft
- Congrats to Ling Xu for winning the Albert P. Godsho Engineering Prize!
- Our CurveQuad robot was featured in Mashable, IEEE Spectrum Robot Friday, and DigiKey Maker Update
- Welcome to Mason Mitchell and Annie Yang!
- Daniel Feshbach’s CurveQuad paper to be presented at IROS
- Congratulations to Alec Lanter and Rongqian Chen
- Three papers to be presented at IDETC/CIE