Build-a-Bot: Computer-Aided Interactive Robot Design
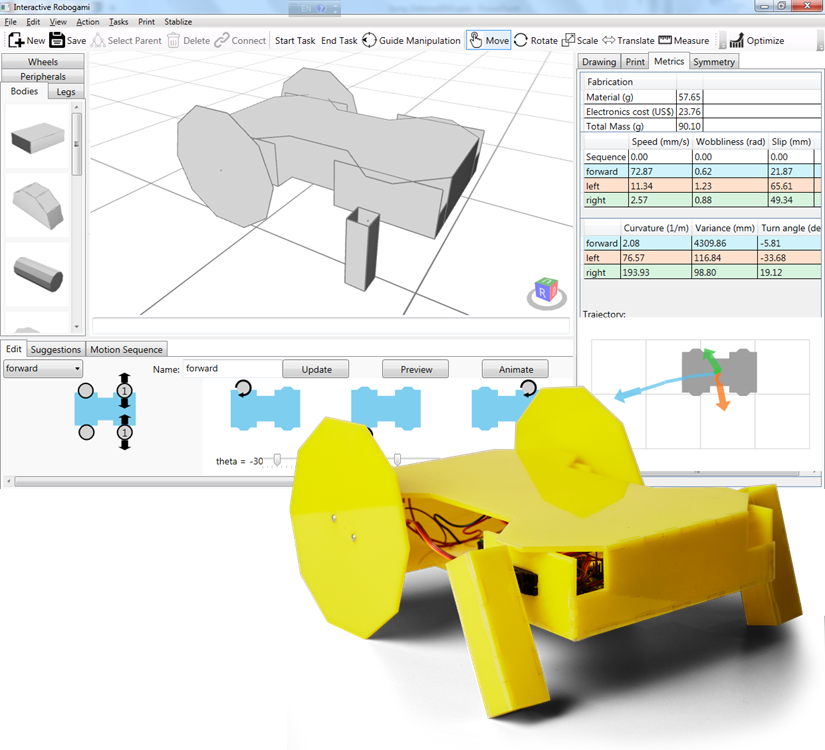
We aim to democratize robotics by making engineering design intuitive and accessible to everyone through computation. Currently robot design is a time and skill intensive process requiring years of training and multiple iterations of prototyping and testing. Unlocking the full potential of ubiquitous robotics requires new intelligent design tools that support experienced and novice users alike in the design process, from ideation to prototyping to validation stages.
Our goal is to develop algorithms and tools for co-design of a robot’s mechanical, electronic, and software components. Using a combination of computational geometry, mechanics modeling, simulation and optimization techniques, we create computational frameworks for designing, fabricating, and controlling robots that are robust to task, environment, and fabrication uncertainties. Unlike static objects, robots rely on complex interactions with their surrounding environment, and their performance is therefore very dependent on their physical designs. We focus on algorithms for design synthesis that provide designs based on evaluated efficiency and robustness tradeoffs.
Our current active projects include:
- Automated exploration of robot topology and geometry
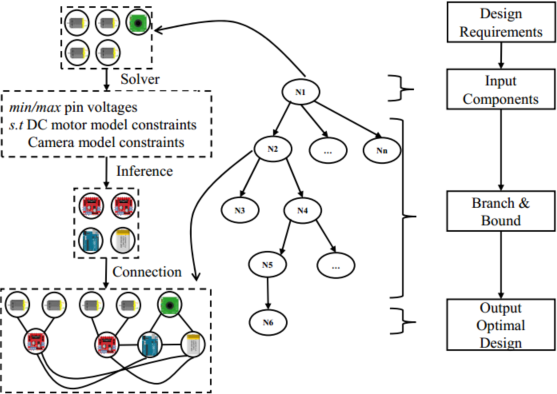
- Co-design of robot controllers and electronics incorporating sensing, actuation, and dynamical constraints
- Studies on usability and feedback useful to users for interactive robot design
Personnel: Wei-Hsi Chen, Daniel Feshbach, Dongsheng Chen
Components of this project are supported by NSF Grant 1845339.
Selected Publications:
Designable Compliance for Soft and Semi-Rigid Robots Capable of Dynamical Behaviors
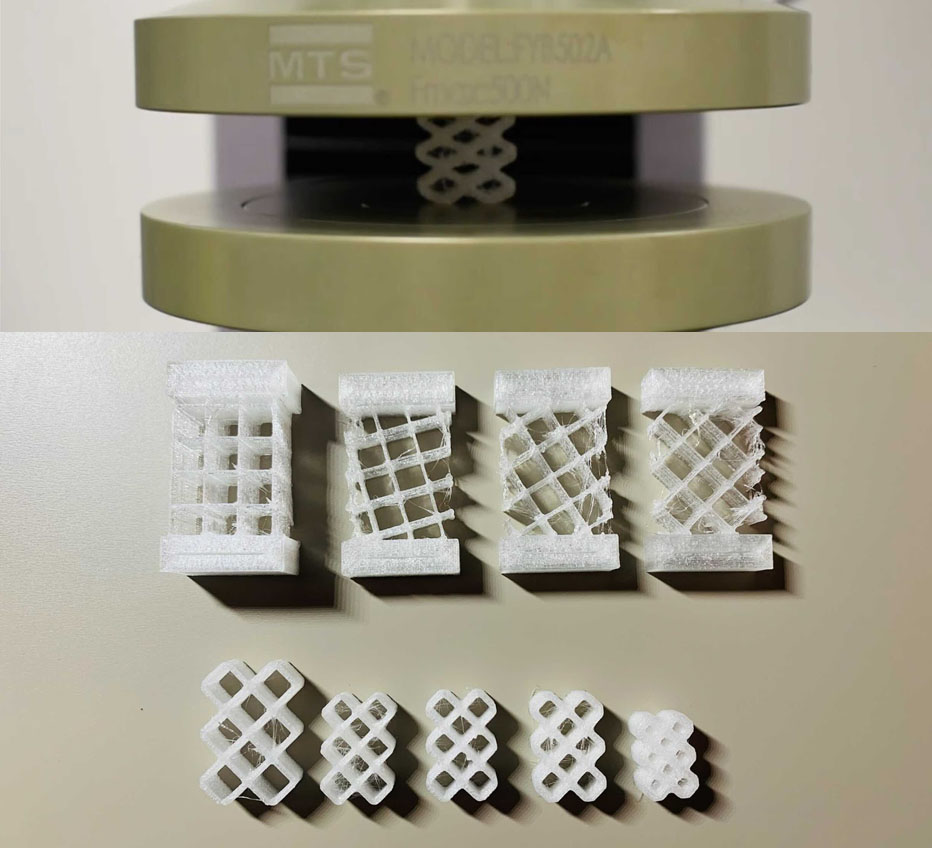
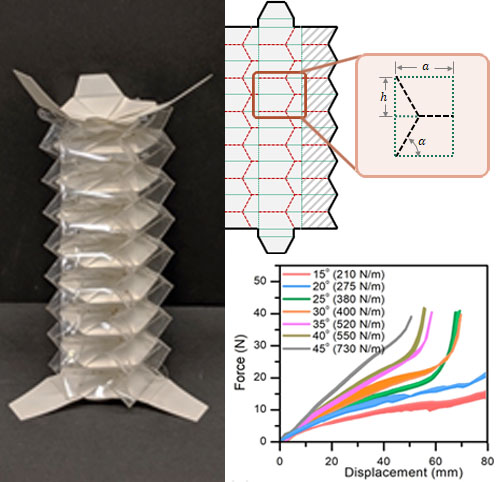
We leverage the inherent mechanics of robots to make them robust and energy-efficient. Compared to traditional rigid robot designs, compliant robots offer greater flexibility and adaptability, but this comes at a high cost of design and fabrication complexity. Our strategy is to design new compliant mechanisms whose inherent mechanics are controlled by geometric parameters, enabling engineers to tune a robot’s natural response independently of its materials and method of fabrication, or a robot to tune its own behavior on site.
We are particularly interested in lattice and tessellation structures and small topological and geometric changes produce different anisotropies, snap-through, or buckling behavior. We develop reduced-parameter models for these designs and demonstrate both theoretically and experimentally how these parameters can be optimized for specific applications, including manipulation, robotic reconfiguration, and jumping.
Our current active projects include:
- Mechanical characterization of 3D printed lattices using compliant materials such as TPU
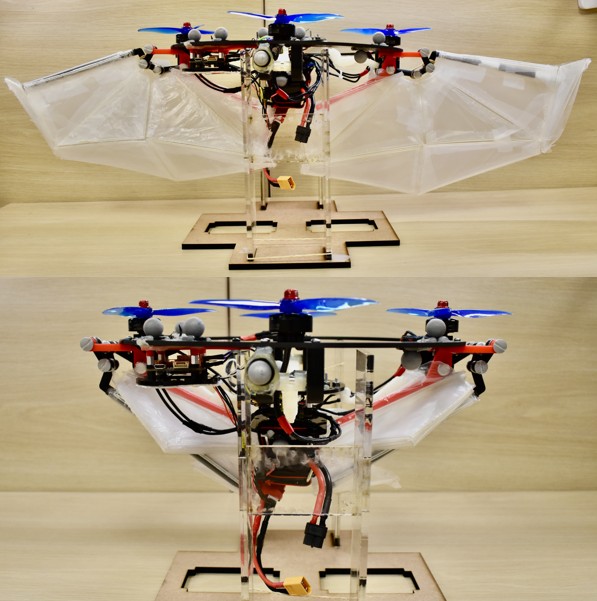
- Snap-through design for morphological reconfiguration in systems including an hybrid aerial vehicle, a bistable gripper, and a jumper
- Experimental exploration on the effect of compliance on robot performance and efficiency in dynamical tasks, including a hybrid aerial vehicle and underwater swimmer
Personnel: Jessica Weakly, Dongsheng Chen, Shivangi Misra
Components of this project are supported by NSF Grant 2121887 and by ONR Award #N00014-23-1-2068, and are performed in collaboration with the Science of Learning Innovation and Control, Embodied MURI Program.
Selected Publications
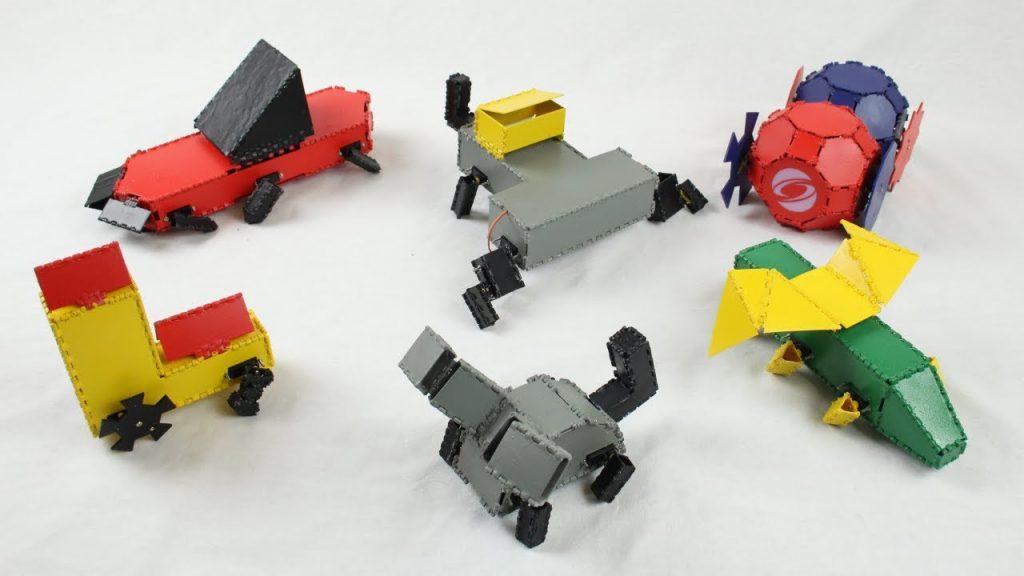
Rapid Fabrication and Assembly of Folding Machines
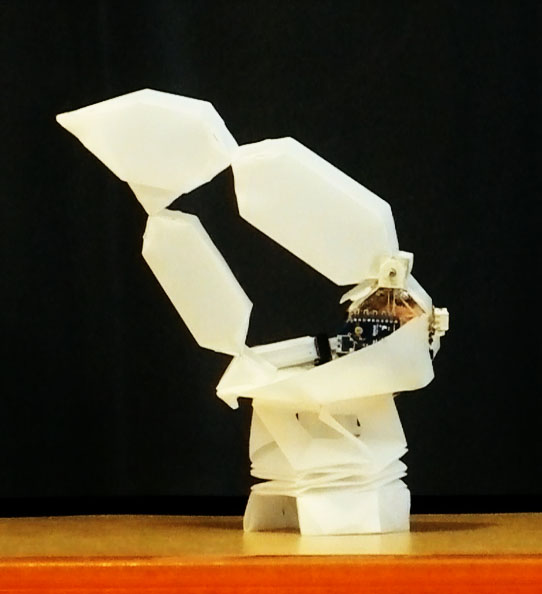
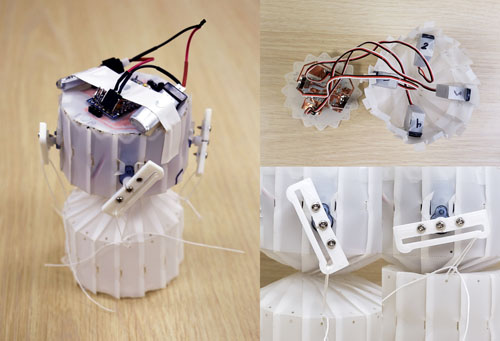
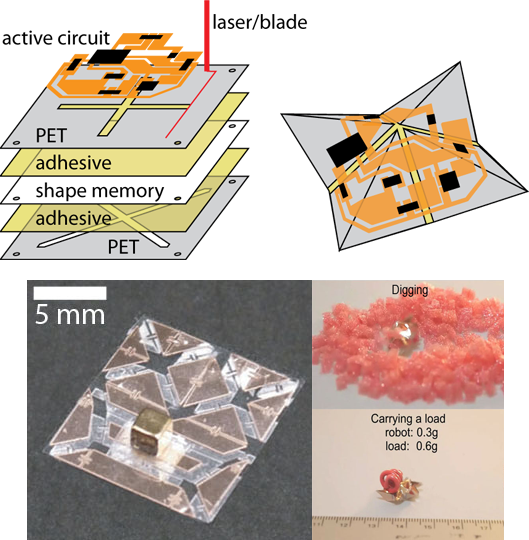
We investigate new ways to use and combine existing digital manufacturing tools such as 3D printing, lamination, and origami-inspired assembly to construct robots within hours. Print-and-fold manufacturing promises customizable robots with embedded actuation, sensing, and electronics. These processes create devices that are low-weight, low-power, and low-cost, and that can produce complex behaviors with relatively simple actuation requirements. Due to inbuilt compliance and alterable crease pattern parameters, different behaviors can be programmed directly into the bodies of these robots.
We create new systems for streamlining this fabrication by embedding fabrication constraints into computational tools, automatically converting designs into valid plans that can be sent straight to the printer. We develop reduced-order models to predict the behavior of the fabricated structures and to design origami-inspired robots for particular tasks. By taking advantage of active materials such as shape memory polymers, we also develop new self-folding and self-assembly processes to turn virtual robot designs into physical designs with minimal human assembly.
Our current active projects include:
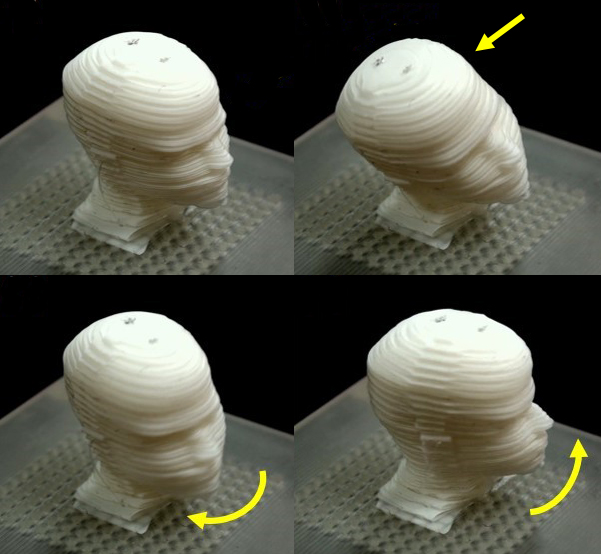
- Distributed actuation using smart materials embedded into a multi-layer origami pattern, enabling active stiffness control in a soft robotic manipulator and an adjustable pulmonary artery band
- Design of origami mechanisms for minimal actuation in applications including jumping and swimming
- Modeling of curved crease patterns for achieving desired folding motions while minimizing origami pattern complexity
- Design and fabrication approaches for self-folding of complex origami patterns requiring sequential folding
Personnel: Gabriel Unger, Daniel Feshbach, Wei-Hsi Chen
Components of this project are supported by the Johnson & Johnson WiSTEM2D Scholars Program, by the Children’s Hospital of Philadelphia, and by the Penn Health-Tech Pilot Award Program.
Selected Publications
Modeling, Planning, and Control for Reconfigurable Robots

Self-reconfiguring robots and programmable matter smart materials, which can morph themselves to achieve a wide variety of different shapes and stiffnesses as tasks demand, are ideal for flexible and adaptable functionality. Compliant mechanics offer unique opportunities to enable high degree of freedom reconfigurability with reduced actuation and control.
We are interested in the fundamental theoretical and computational questions underlying robotic reconfiguration, in particular, questions such as what configurations are possible to achieve and how to plan for reconfiguration in a scalable manner. We leverage techniques from computational geometry and distributed algorithms to answer these questions, generating planning and controls methods for compliant reconfigurable robots that scale with the robot’s degrees of freedom.
Our current active projects include:
- Distributed control for adaptive stiffness in parameterized origami structures in applications such as manipulation and legged locomotion
- Geometric characterization of surfaces achievable using origami tessellations with straight and curved creases
- Simulation and planning for modular trusses and lattices with tendon-driven control
Personnel: Jessica Weakly, Shivangi Misra