Our recently submitted paper “Coupled Jet Coordination and Physical Arrangement in Salp-Inspired Multi-Robot Swimming” has been published on the Bioinspiration & Biomimetics. Congratulations to the authors, Zhiyuan (Annie) Yang, Yipeng Zhang, Jingshuo Li, Neel Mulay, Ani Hsieh, Kelly Sutherland, Paulo Arratia and Cynthia Sung, for this exciting new research!
Zhiyuan Yang, Yipeng Zhang, Jingshuo Li, Neel Mulay, M. Ani Hsieh, Kelly R. Sutherland, Paulo E. Arratia, Cynthia Sung: Coupled Jet Coordination and Physical Arrangement in Salp-Inspired Multi-Robot Swimming. In: Bioinspiration & Biomimetics, vol. 20, iss. RoboTwin, no. 6, pp. 066010, 2025.
Our lab’s work was recently featured in the landing page or Penn and Penn Today! In collaboration with NASA and several partner universities, we’re developing TRUSSES that combines the strengths of legged and wheeled robots to enable multi-robot teams to explore areas previously too steep or unstable for traditional rovers. Read more about how we’re helping shape the future of planetary exploration 🚀: Penn Engineering: Navigating the Landscapes of Lunar Robots on the Moon and Mars.
Congratulations to Jeffery, Kayleen, Sophie, and Yi Lu! They have presented their research in the Penn Undergraduate Research Mentoring Program (PURM) poster session, and we couldn’t be more proud! Read more about the poster presentation here.
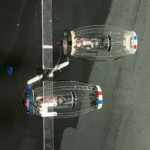
As part of the TRUSSES project, Dr. Cynthia Sung and her students Shivangi Misra and Jingshuo Li took a team of legged and wheeled robots out to White Sands National Park, a lunar-analogue environment, to test cooperative locomotion. These robots were able to connect to one another with rigid, extendable arms and climbed sandy dune slopes of up to 18 degrees while remaining tethered, a first-of-its-kind demonstration! During the expedition, our team also collected data to study the interaction forces between the robots as well as with the dune surface. This will help us test our hypothesis that physically connected robots can stabilize one another and climb sandy sloped terrain with greater success than individual robots!
Special thanks to Feifei Qian and Ryan Ewing for guiding us to suitable dune sites, helping measure terrain properties as well as coordinating the logistics for smooth and safe field work!
Congratulations to Zhiyuan (Annie) Yang and Neel Mulay for receiving the Best Poster Award at the “2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention” workshop! We are so proud of you!