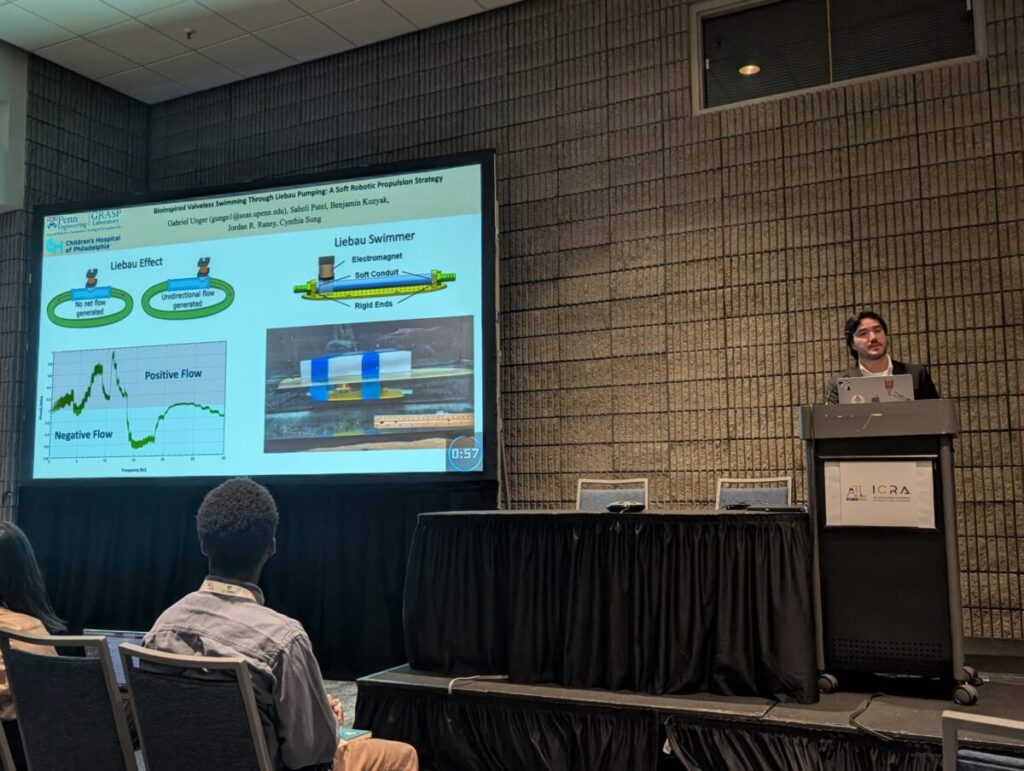
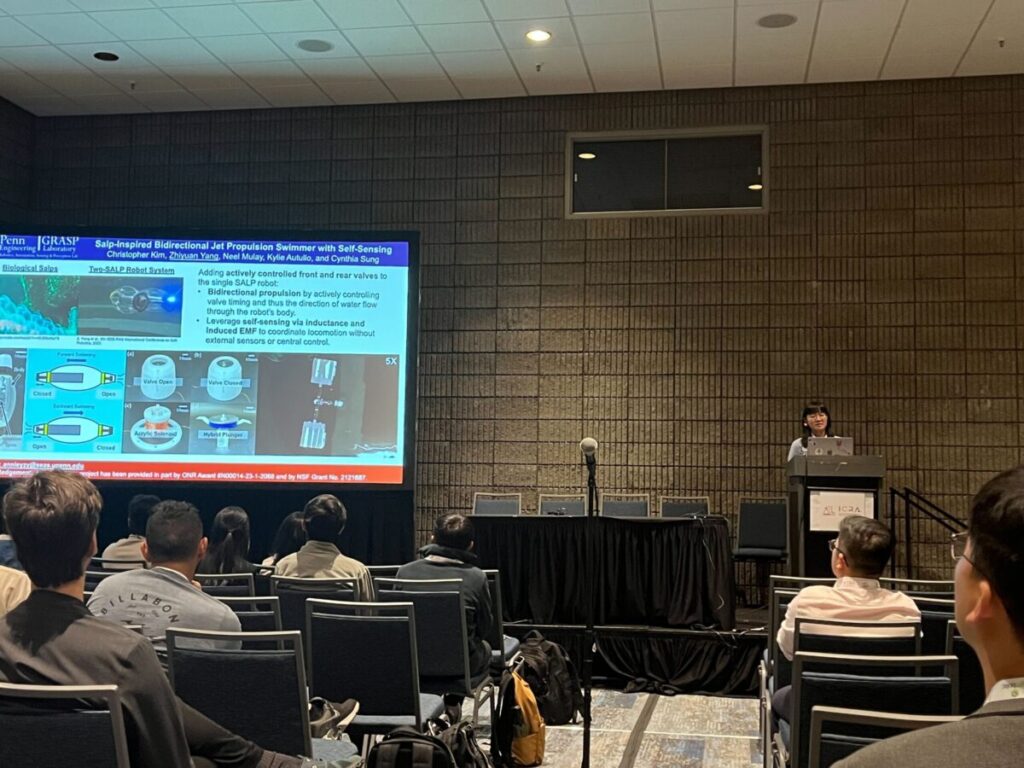
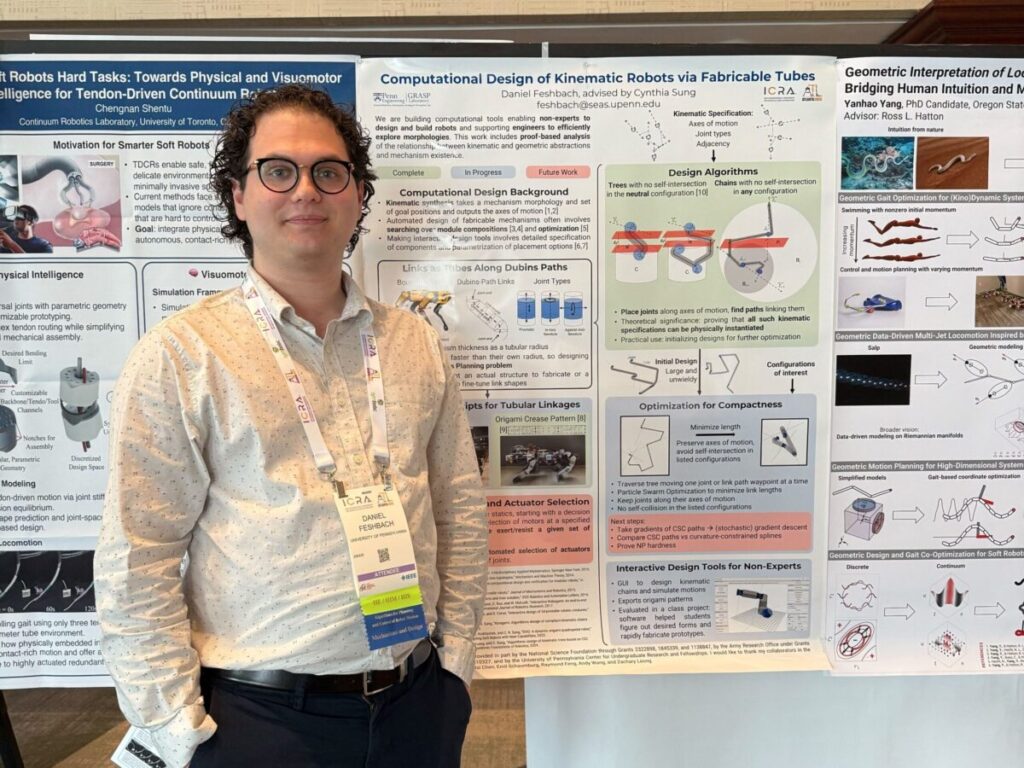
Congratulations to Zhiyuan (Annie) Yang and Gabriel Unger for presenting their new work at the “2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention” workshop and to Daniel Feshbach for presenting his work at the “ICRA 2025 Doctoral Consortium” workshop, on the day 1 of the 2025 IEEE International Conference on Robotics and Automation!