2020 |
|
 | Chen, Wei-Hsi; Misra, Shivangi; Caporale, J. Diego; Koditschek, Daniel E.; Yang, Shu; Sung, Cynthia A tendon-driven origami hopper triggered by proprioceptive contact detection (Conference) IEEE International Conference on Soft Robotics (RoboSoft), 2020. @conference{chen2020tendon,We report on experiments with a laptop-sized (0.23m, 2.53kg), paper origami robot that exhibits highly dynamic and stable two degree-of-freedom (circular boom) hopping at speeds in excess of 1.5 bl/s (body-lengths per second) at a specific resistance O(1) while achieving aerial phase apex states 25% above the stance height over thousands of cycles. Three conventional brushless DC motors load energy into the folded paper springs through pulley-borne cables whose sudden loss of tension upon touchdown triggers the release of spring potential that accelerates the body back through liftoff to flight with a 20W powerstroke, whereupon the toe angle is adjusted to regulate fore-aft speed. We also demonstrate in the vertical hopping mode the transparency of this actuation scheme by using proprioceptive contact detection with only motor encoder sensing. The combination of actuation and sensing shows potential to lower system complexity for tendon-driven robots. |
 | Chen, Wei-Hsi; Misra, Shivangi; Gao, Yuchong; Lee, Young-Joo; Koditschek, Daniel E.; Yang, Shu; Sung, Cynthia A programmably compliant origami mechanism for dynamically dexterous robots (Journal Article) In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2131-2137, 2020. @article{chen2020programmably,We present an approach to overcoming challenges in dynamical dexterity for robots through programmably compliant origami mechanisms. Our work leverages a one-parameter family of flat sheet crease patterns that folds into origami bellows, whose axial compliance can be tuned to select desired stiffness. Concentrically arranged cylinder pairs reliably manifest additive stiffness, extending the programmable range by nearly an order of magnitude and achieving bulk axial stiffness spanning 200-1500 Nm-1 using 8 mil thick polyester-coated paper. Accordingly, we design origami energy-storing springs with a stiffness of 1035 Nm-1 each and incorporate them into a three degree-of-freedom (DOF) tendon-driven spatial pointing mechanism that exhibits trajectory tracking accuracy less than 15% rms error within a (~2 cm)3 volume. The origami springs can sustain high power throughput, enabling the robot to achieve asymptotically stable juggling for both highly elastic (1 kg resilient shotput ball) and highly damped (“medicine ball”) collisions in the vertical direction with apex heights approaching 10 cm. The results demonstrate that “soft” robotic mechanisms are able to perform a controlled, dynamically actuated task. |
2019 |
|
 | Tosun, Tarik; Sung, Cynthia; McCloskey, Colin; Yim, Mark Optimal Structure Synthesis for Environment Augmenting Robots (Journal Article) In: IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1069-1076, 2019. @article{tosun2019optimal,Building structures can allow a robot to surmount large obstacles, expanding the set of areas it can reach. This paper presents a planning algorithm to automatically determine what structures a construction-capable robot must build in order to traverse its entire environment. Given an environment, a set of building blocks, and a robot capable of building structures, we seek a optimal set of structures (using a minimum number of building blocks) that could be built to make the entire environment traversable with respect to the robot's movement capabilities. We show that this problem is NP-Hard, and present a complete, optimal algorithm that solves it using a branch-and-bound strategy. The algorithm runs in exponential time in the worst case, but solves typical problems with practical speed. In hardware experiments, we show that the algorithm solves 3D maps of real indoor environments in about one minute, and that the structures selected by the algorithm allow a robot to traverse the entire environment. An accompanying video is available online at https://youtu.be/B9WM557NP44. |
2018 |
|
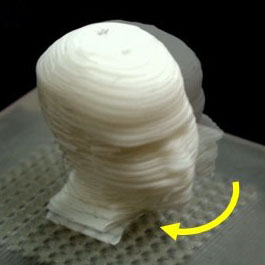
 | Yuan, Hang; Pikul, James; Sung, Cynthia Programmable 3-D surfaces using origami tessellations (Conference) 7th International Meeting on Origami in Science, Mathematics, and Education, 2018. @conference{yuan2018programmable,We present an origami-inspired approach to reconfigurable surfaces. A circular origami tessellation with the ability to extend and flatten was designed to approximate radially symmetric 3-D surfaces. The pattern exhibits snap-through effects, allowing desired 3-D shapes to be maintained indefinitely without additional infrastructure or energy input. We characterize the geometry of the fold pattern and its resulting 3-D shape, present a strategy for reconfiguration, and demonstrate this strategy for surfaces with positive, negative, and zero Gaussian curvature. |
 | Deng, Xiang; Sung, Cynthia Leveraging compliance in origami robot legs for robust and natural locomotion (Conference) 7th International Meeting on Origami in Science, Mathematics, and Education, 2018. @conference{deng2018leveraging,We present an origami-inspired compliant robot leg design with three degree of freedom compliance. Using the proposed leg, we created a full quadrupedal robot that can walk robustly with adaption to non-flat terrains and external perturbations. We can reconfigure the design to change the stiffness. According to systematic locomotion tests, we demonstrate unique advantages of the proposed leg design over a rigid counterpart of the same dimension and weight in terms of enhancing locomotion stability |
 | Yim, Sehyuk; Sung, Cynthia; Miyashita, Shuhei; Rus, Daniela; Kim, Sangbae Animatronic soft robots by additive folding (Journal Article) In: International Journal of Robotics Research, vol. 37, no. 6, pp. 611-628, 2018. @article{yim2018animatronic,This paper presents a new class of animatronic soft robots created by a desktop fabrication mechanism called additive folding. In this method, two-dimensional (2D) slices are threaded by multiple strings, accordion-folded by flexure hinges and finally stacked into a predefined three-dimensional (3D) structure. As the 3D assembly of the slices is controlled by embedded strings, it becomes an animatronic soft robot that moves like a biological creature and that shows life-like movements. We create a computational design algorithm that takes as input a desired 3D geometry of the robot, and that produces a 2D surface with built-in folds and string-based actuators. This paper describes the entire robot design process and demonstrates various animatronic motions, highlighting the vision of desktop fabrication technology and its potential applications in animatronics and robotic art. |
 | Rus, Daniela; Sung, Cynthia Spotlight on origami robots (Journal Article) In: Science Robotics, vol. 3, no. 15, pp. eaat0938, 2018. @article{rus2018spotlight,Origami robots promise a future with increased customizability and adaptability in autonomous machines. |
2017 |
|
 | Schulz, Adriana; Sung, Cynthia; Spielberg, Andrew; Zhao, Wei; Cheng, Yu; Grinspun, Eitan; Rus, Daniela; Matusik, Wojciech Interactive Robogami: An end-to-end system for design of robots with ground locomotion (Journal Article) In: International Journal of Robotics Research, vol. 36, no. 10, pp. 1131-1147, 2017. @article{schulz2017interactive,This paper aims to democratize the design and fabrication of robots, enabling people of all skill levels to make robots without needing expert domain knowledge. Existing work in computational design and rapid fabrication has explored this question of customization for physical objects but so far has not been able to conquer the complexity of robot designs. We have developed Interactive Robogami, a tool for composition-based design of ground robots that can be fabricated as flat sheets and then folded into 3D structures. This rapid prototyping process enables users to create lightweight, affordable, and materially versatile robots with short turnaround time. Using Interactive Robogami, designers can compose new robot designs from a database of print-and-fold parts. The designs are tested for the users’ functional specifications via simulation and fabricated on user satisfaction. We present six robots designed and fabricated using a 3D printing based approach, as well as a larger robot cut from sheet metal. We have also conducted a user study that demonstrates that our tool is intuitive for novice designers and expressive enough to create a wide variety of ground robot designs. |
 | Sung, Cynthia; Lin, Rhea; Miyashita, Shuhei; Yim, Sehyuk; Kim, Sangbae; Rus, Daniela Self-folded soft robotic structures with controllable joints (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2017. @conference{sung2017self,This paper describes additive self-folding, an origami-inspired rapid fabrication approach for creating actuatable compliant structures. Recent work in 3-D printing and other rapid fabrication processes have mostly focused on rigid objects or objects that can achieve small deformations. In contrast, soft robots often require elastic materials and large amounts of movement. Additive self-folding is a process that involves cutting slices of a 3-D object in a long strip and then pleat folding them into a likeness of the original model. The zigzag pattern for folding enables large bending movements that can be actuated and controlled. Gaps between slices in the folded model can be designed to provide larger deformations or higher shape accuracy. We advance existing planar fabrication and self-folding techniques to automate the fabrication process, enabling highly compliant structures with complex 3-D geometries to be designed and fabricated within a few hours. We describe this process in this paper and provide algorithms for converting 3-D meshes into additive self-folding designs. The designs can be rapidly instrumented for global control using magnetic fields or tendon-driven for local bending. We also describe how the resulting structures can be modeled and their responses to tendon-driven control predicted. We test our design and fabrication methods on three models (a bunny, a tuna fish, and a starfish) and demonstrate the method's potential for actuation by actuating the tuna fish and starfish models using tendons and magnetic control. |
 | Spielberg, Andrew; Araki, Brandon; Sung, Cynthia; Tedrake, Russ; Rus, Daniela Functional co-optimization of articulated robots (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2017. @conference{spielberg2017functional,We present parametric trajectory optimization, a method for simultaneously computing physical parameters, actuation requirements, and robot motions for more efficient robot designs. In this scheme, robot dimensions, masses, and other physical parameters are solved for concurrently with traditional motion planning variables, including dynamically consistent robot states, actuation inputs, and contact forces. Our method requires minimal user domain knowledge, requiring only a coarse guess of the target robot configuration sequence and a parameterized robot topology as input. We demonstrate our results on four simulated robots, one of which we physically fabricated in order to demonstrate physical consistency. We demonstrate that by optimizing robot body parameters alongside robot trajectories, motion planning problems which would otherwise be infeasible can be made feasible, and actuation requirements can be significantly reduced. |
2015 |
|
Feldman, Dan; Sung, Cynthia; Sugaya, Andrew; Rus, Daniela iDiary: From GPS signals to a text-searchable diary (Journal Article) In: ACM Transactions on Sensor Networks, vol. 11, no. 4, pp. 60, 2015. @article{feldman2015idiary,This article describes iDiary, a system that takes as input GPS data streams generated by users’ phones and turns them into textual descriptions of the trajectories. The system features a user interface similar to Google Search that allows users to type text queries on their activities (e.g., “Where did I buy books?”) and receive textual answers based on their GPS signals. iDiary uses novel algorithms for semantic compression and trajectory clustering of massive GPS signals in parallel to compute the critical locations of a user. We encode these problems as follows. The k-segment mean is a k-piecewise linear function that minimizes the regression distance to the signal. The (k,m)-segment mean has an additional constraint that the projection of the k segments on Rd consists of only m ≤ k segments. A coreset for this problem is a smart compression of the input signal that allows computation of a (1+ϵ)-approximation to its k-segment or (k,m)-segment mean in O(nlogn) time for arbitrary constants ϵ, k, and m. We use coresets to obtain a parallel algorithm that scans the signal in one pass, using space and update time per point that is polynomial in log n. Using an external database, we then map these locations to textual descriptions and activities so that we can apply text mining techniques on the resulting data (e.g., LSA or transportation mode recognition). We provide experimental results for both the system and algorithms and compare them to existing commercial and academic state of the art. This is the first GPS system that enables text-searchable activities from GPS data. | |
Sung, Cynthia; Rus, Daniela Data-driven task assignment for multi-vehicle package delivery (Workshop) IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), ECHORD++ Workshop on Urban Robotic Applications, 2015. (BibTeX) @workshop{Sung2015c, | |
Sung, Cynthia; Rus, Daniela Automated fabrication of foldable robots using thick materials (Conference) International Symposium on Robotics Research, 2015. @conference{sung2015automated,Designing complex machines such as robots often requires multiple iterations of design and prototyping. Folding has recently emerged as a method to both simplify fabrication and accelerate assembly of such machines. However, the robots so far produced by folding have often been made of thin, flexible materials that limit their size and strength. We introduce a folding-based fabrication process that uses thick materials layered with flexible film to enable folding while maintaining high stiffness in the folded structure. We use this process to fabricate multiple solid bodies, as well as two hexapods, one of which can carry up to 2.50 kg payloads. Each folded structure took less than 3 h to construct. Our results indicate that folding using thick materials can be a viable method for rapidly fabricating and prototyping larger and sturdier robots. | |
Schulz, Adriana; Sung, Cynthia; Spielberg, Andrew; Zhao, Wei; Cheng, Yu; Mehta, Ankur; Grinspun, Eitan; Rus, Daniela; Matusik, Wojciech Interactive Robogami: Data-driven design for 3D print and fold robots with ground locomotion (Workshop) ACM SIGGRAPH Talks, ACM, 2015. @workshop{schulz2015interactive,The process of designing and programming a new robot requires expert knowledge and design skills that are often acquired over the course of many years. This makes design of new robots difficult for non-experienced users. In addition to design, physical realization of a robot is also time and labor intensive. We propose a new fabrication process for mechanical robots, called 3D print and fold, which combines 3D printing with origami fabrication methods. In our technique, robots are 3D printed as flat faces connected at joints and are then folded into their final shape. To help casual users design ground robots using our 3D print and fold technique, we present our Interactive Robogami system. The system leverages a database of examples created by expert roboticists. A composition tool allows users to create new designs by composing parts from the robots in this database. The system automatically ensures that the assembled robot is fabricable and that it can locomote forward while still giving creative freedom to users. | |
Niiyama, Ryuma; Sun, Xu; Sung, Cynthia; An, Byoungkwon; Rus, Daniela; Kim, Sangbae Pouch motors: Printable soft actuators integrated with computational design (Journal Article) In: Soft Robotics, vol. 2, no. 2, pp. 59-70, 2015. @article{niiyama2015pouch,We propose pouch motors, a new family of printable soft actuators integrated with computational design. The pouch motor consists of one or more inflatable gas-tight bladders made of sheet materials. This printable actuator is designed and fabricated in a planar fashion. It allows both easy prototyping and mass fabrication of affordable robotic systems. We provide theoretical models of the actuators compared with the experimental data. The measured maximum stroke and tension of the linear pouch motor are up to 28% and 100 N, respectively. The measured maximum range of motion and torque of the angular pouch motor are up to 80° and 0.2 N, respectively. We also develop an algorithm that automatically generates the patterns of the pouches and their fluidic channels. A custom-built fabrication machine streamlines the automated process from design to fabrication. We demonstrate a computer-generated life-sized hand that can hold a foam ball and perform gestures with 12 pouch motors, which can be fabricated in 15 min. | |
Sung, Cynthia; Bern, James; Romanishin, James; Rus, Daniela Reconfiguration planning for pivoting cube modular robots (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2015. @conference{sung2015reconfiguration,In this paper, we present algorithms for self-reconfiguration of modular robots that move by pivoting. The modules are cubes that can pivot about their edges along the x̂, ŷ, or ẑ axes to move on a 3-dimensional substrate. This is a different model from prior work, which usually considers modules that slide along their faces. We analyze the pivoting cube model and give sufficient conditions for reconfiguration to be feasible. In particular, we show that if an initial configuration does not contain any of three subconfigurations, which we call rules, then it can reconfigure into a line. We provide provably correct algorithms for reconfiguration for both 2-D and 3-D systems, and we verify our algorithms via simulation on randomly generated 2-D and 3-D configurations. | |
Miyashita, Shuhei; Guitron, Steven; Ludersdorfer, Marvin; Sung, Cynthia; Rus, Daniela An untethered miniature origami robot that self-folds, walks, swims, and degrades (Conference) IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2015. @conference{miyashita2015untethered,A miniature robotic device that can fold-up on the spot, accomplish tasks, and disappear by degradation into the environment promises a range of medical applications but has so far been a challenge in engineering. This work presents a sheet that can self-fold into a functional 3D robot, actuate immediately for untethered walking and swimming, and subsequently dissolve in liquid. The developed sheet weighs 0.31 g, spans 1.7 cm square in size, features a cubic neodymium magnet, and can be thermally activated to self-fold. Since the robot has asymmetric body balance along the sagittal axis, the robot can walk at a speed of 3.8 body-length/s being remotely controlled by an alternating external magnetic field. We further show that the robot is capable of conducting basic tasks and behaviors, including swimming, delivering/carrying blocks, climbing a slope, and digging. The developed models include an acetone-degradable version, which allows the entire robot's body to vanish in a liquid. We thus experimentally demonstrate the complete life cycle of our robot: self-folding, actuation, and degrading. | |
Sung, Cynthia; Rus, Daniela Foldable joints for foldable robots (Journal Article) In: ASME Journal of Mechanisms and Robotics, vol. 7, no. 2, pp. 021012, 2015. @article{sung2015foldable,Print-and-fold manufacturing has the potential to democratize access to robots with robots that are easier to fabricate using materials that are easier to procure. Unfortunately, a lack of understanding about how motion can be achieved by folding hinders the scope of print-and-fold robots. In this paper, we show how the basic joints used in robots can be constructed using print-and-fold. Our patterns are parameterized so that users not only get the desired degrees of freedom but can also specify the joint's range of motion. The joints can be combined with each other to achieve higher degrees of freedom or with rigid bodies to produce foldable linkages. We have folded our basic joints and measured their force–displacement curves. We have composed them into joints with higher degrees of freedom and into foldable mechanisms and found that they achieve the expected kinematics. We have also added actuators and control circuitry to our joints and mechanisms, showing that it is possible to print and fold entire robots with many different kinematics using a uniform process. | |
Miyashita, Shuhei; DiDio, Isabello; Ananthabhotla, Ishwarya; An, Byoungkwon; Sung, Cynthia; Arabagi, Slava; Rus, Daniela Folding angle regulation by curved crease design for self-assembling origami propellers (Journal Article) In: ASME Journal of Mechanisms and Robotics, vol. 7, no. 2, pp. 021013, 2015. @article{miyashita2015folding,This paper describes a method for manufacturing complex three-dimensional curved structures by self-folding layered materials. Our main focus is to first show that the material can cope with curved crease self-folding and then to utilize the curvature to predict the folding angles. The self-folding process employs uniform heat to induce self-folding of the material and shows the successful generation of several types of propellers as a proof of concept. We further show the resulting device is functional by demonstrating its levitation in the presence of a magnetic field applied remotely. | |
2014 |
|
Sung, Cynthia; Rus, Daniela Foldable joints for foldable robots (Conference) International Symposium on Experimental Robotics (ISER), 2014. @conference{Sung2014,Print-and-fold approaches to robot fabrication allow entire robots to be produced using a single uniform process: fabricating them in-plane and then folding them into their 3-D forms. Current efforts to design print-and-fold robots have been limited by a lack of understanding of what motions can be achieved by folding. In this paper, we introduce fold patterns for three basic joints commonly used in robots, and we show how the patterns can be changed to accommodate user-specified ranges of motion. The joints are composed with each other to produce joints with higher degrees of freedom and with rigid bodies to produce entire foldable linkage mechanisms. We have folded our basic joints and composed mechanisms, and they achieve the expected kinematics. We have also printed control circuitry on and attached actuators directly to three of our designs, demonstrating that it possible to print and fold robots with many different kinematics. | |
2013 |
|
Feldman, Dan; Sugaya, Andrew; Sung, Cynthia; Rus, Daniela iDiary: From GPS signals to a text-searchable diary (Conference) 11th ACM Conference on Embedded Networked Sensor Systems (SenSys), ACM, 2013. @conference{feldman2013idiary,This paper describes a system that takes as input GPS data streams generated by users' phones and creates a searchable database of locations and activities. The system is called iDiary and turns large GPS signals collected from smartphones into textual descriptions of the trajectories. The system features a user interface similar to Google Search that allows users to type text queries on their activities (e.g., "Where did I buy books?") and receive textual answers based on their GPS signals. iDiary uses novel algorithms for semantic compression (known as coresets) and trajectory clustering of massive GPS signals in parallel to compute the critical locations of a user. Using an external database, we then map these locations to textual descriptions and activities so that we can apply text mining techniques on the resulting data (e.g. LSA or transportation mode recognition). We provide experimental results for both the system and algorithms and compare them to existing commercial and academic state-of-the-art. This is the first GPS system that enables text-searchable activities from GPS data. | |
Sung, Cynthia; Demaine, Erik D.; Demaine, Martin L.; Rus, Daniela Edge-compositions of 3-D surfaces (Journal Article) In: ASME Journal of Mechanical Design, vol. 135, no. 11, pp. 111001, 2013. @article{sung2013edge,Origami-based design methods enable complex devices to be fabricated quickly in plane and then folded into their final 3D shapes. So far, these folded structures have been designed manually. This paper presents a geometric approach to automatic composition of folded surfaces, which will allow existing designs to be combined and complex functionality to be produced with minimal human input. We show that given two surfaces in 3D and their 2D unfoldings, a surface consisting of the two originals joined along an arbitrary edge can always be achieved by connecting the two original unfoldings with some additional linking material, and we provide a polynomial-time algorithm to generate this composite unfolding. The algorithm is verified using various surfaces, as well as a walking and gripping robot design. | |
Sung, Cynthia; Demaine, Erik D.; Demaine, Martin L.; Rus, Daniela Joining unfoldings of 3-D surfaces (Conference) ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), ASME, 2013. @conference{sung2013joining,Origami-based design methods enable complex devices to be fabricated quickly in plane and then folded into their final 3-D shapes. So far, these folded structures have been designed manually. This paper presents a geometric approach to automatic composition of folded surfaces, which will allow existing designs to be combined and complex functionality to be produced with minimal human input. We show that given two surfaces in 3-D and their 2-D unfoldings, a surface consisting of the two originals joined along an arbitrary edge can always be achieved by connecting the two original unfoldings with some additional linking material, and we provide an algorithm to generate this composite unfolding. The algorithm is verified using various surfaces, as well as a walking and gripping robot design. | |
Sung, Cynthia; Ayanian, Nora; Rus, Daniela Improving the performance of multi-robot systems by task switching (Conference) IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2013. @conference{sung2013improving,We consider the problem of task assignment for a multi-robot system where each robot must attend to one or more queues of tasks. We assume that individual robots have no knowledge of tasks in the environment that are not in their queue. Robots in communication with each other may share information about active tasks and exchange queues to achieve lower cost for the system. We show that allowing this kind of task switching causes tasks to be completed more efficiently. In addition, we present conditions under which queues can be guaranteed to make progress, and we support these claims with simulation and experimental results. This work has potential applications in manufacturing, environmental exploration, and pickup-delivery tasks. | |
Wu, Cathy; Feldman, Dan; Sung, Cynthia; Rus, Daniela Using coresets for map making for long-term operation of robots (Workshop) IEEE International Conference on Robotics and Automation (ICRA), Workshop on Long-Term Autonomy, 2013. (BibTeX) @workshop{wu2013using, | |
2012 |
|
Feldman, Dan; Sung, Cynthia; Rus, Daniela The single pixel GPS: Learning big data signals from tiny coresets (Conference) 20th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (GIS 2012), ACM, 2012. @conference{feldman2012single,We present algorithms for simplifying and clustering patterns from sensors such as GPS, LiDAR, and other devices that can produce high-dimensional signals. The algorithms are suitable for handling very large (e.g. terabytes) streaming data and can be run in parallel on networks or clouds. Applications include compression, denoising, activity recognition, road matching, and map generation. We encode these problems as (k, m)-segment mean problems. Formally, we provide (1 + ε)-approximations to the k-segment and (k, m)-segment mean of a d-dimensional discrete-time signal. The k-segment mean is a k-piecewise linear function that minimizes the regression distance to the signal. The (k,m)-segment mean has an additional constraint that the projection of the k segments on Rd consists of only m ≤ k segments. Existing algorithms for these problems take O(kn2) and nO(mk) time respectively and O(kn2) space, where n is the length of the signal. Our main tool is a new coreset for discrete-time signals. The coreset is a smart compression of the input signal that allows computation of a (1 + ε)-approximation to the k-segment or (k,m)-segment mean in O(n log n) time for arbitrary constants ε,k, and m. We use coresets to obtain a parallel algorithm that scans the signal in one pass, using space and update time per point that is polynomial in log n. We provide empirical evaluations of the quality of our coreset and experimental results that show how our coreset boosts both inefficient optimal algorithms and existing heuristics. We demonstrate our results for extracting signals from GPS traces. However, the results are more general and applicable to other types of sensors. | |
Sung, Cynthia; Feldman, Dan; Rus, Daniela Trajectory clustering for motion prediction (Conference) IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2012. @conference{sung2012trajectory,We investigate a data-driven approach to robotic path planning and analyze its performance in the context of interception tasks. Trajectories of moving objects often contain repeated patterns of motion, and learning those patterns can yield interception paths that succeed more often. We therefore propose an original trajectory clustering algorithm for extracting motion patterns from trajectory data and demonstrate its effectiveness over the more common clustering approach of using k-means. We use the results to build a Hidden Markov Model of a target's motion and predict movement. Our simulations show that these predictions lead to more effective interception. The results of this work have potential applications in coordination of multi-robot systems, tracking and surveillance tasks, and dynamic obstacle avoidance. | |
Publications
2020 |
|
| A tendon-driven origami hopper triggered by proprioceptive contact detection (Conference) IEEE International Conference on Soft Robotics (RoboSoft), 2020. |
| A programmably compliant origami mechanism for dynamically dexterous robots (Journal Article) In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2131-2137, 2020. |
2019 |
|
| Optimal Structure Synthesis for Environment Augmenting Robots (Journal Article) In: IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1069-1076, 2019. |
2018 |
|
| Programmable 3-D surfaces using origami tessellations (Conference) 7th International Meeting on Origami in Science, Mathematics, and Education, 2018. |
| Leveraging compliance in origami robot legs for robust and natural locomotion (Conference) 7th International Meeting on Origami in Science, Mathematics, and Education, 2018. |
| Animatronic soft robots by additive folding (Journal Article) In: International Journal of Robotics Research, vol. 37, no. 6, pp. 611-628, 2018. |
| Spotlight on origami robots (Journal Article) In: Science Robotics, vol. 3, no. 15, pp. eaat0938, 2018. |
2017 |
|
| Interactive Robogami: An end-to-end system for design of robots with ground locomotion (Journal Article) In: International Journal of Robotics Research, vol. 36, no. 10, pp. 1131-1147, 2017. |
| Self-folded soft robotic structures with controllable joints (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2017. |
| Functional co-optimization of articulated robots (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2017. |
2015 |
|
iDiary: From GPS signals to a text-searchable diary (Journal Article) In: ACM Transactions on Sensor Networks, vol. 11, no. 4, pp. 60, 2015. | |
Data-driven task assignment for multi-vehicle package delivery (Workshop) IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), ECHORD++ Workshop on Urban Robotic Applications, 2015. | |
Automated fabrication of foldable robots using thick materials (Conference) International Symposium on Robotics Research, 2015. | |
Interactive Robogami: Data-driven design for 3D print and fold robots with ground locomotion (Workshop) ACM SIGGRAPH Talks, ACM, 2015. | |
Pouch motors: Printable soft actuators integrated with computational design (Journal Article) In: Soft Robotics, vol. 2, no. 2, pp. 59-70, 2015. | |
Reconfiguration planning for pivoting cube modular robots (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2015. | |
An untethered miniature origami robot that self-folds, walks, swims, and degrades (Conference) IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2015. | |
Foldable joints for foldable robots (Journal Article) In: ASME Journal of Mechanisms and Robotics, vol. 7, no. 2, pp. 021012, 2015. | |
Folding angle regulation by curved crease design for self-assembling origami propellers (Journal Article) In: ASME Journal of Mechanisms and Robotics, vol. 7, no. 2, pp. 021013, 2015. | |
2014 |
|
Foldable joints for foldable robots (Conference) International Symposium on Experimental Robotics (ISER), 2014. | |
2013 |
|
iDiary: From GPS signals to a text-searchable diary (Conference) 11th ACM Conference on Embedded Networked Sensor Systems (SenSys), ACM, 2013. | |
Edge-compositions of 3-D surfaces (Journal Article) In: ASME Journal of Mechanical Design, vol. 135, no. 11, pp. 111001, 2013. | |
Joining unfoldings of 3-D surfaces (Conference) ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), ASME, 2013. | |
Improving the performance of multi-robot systems by task switching (Conference) IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2013. | |
Using coresets for map making for long-term operation of robots (Workshop) IEEE International Conference on Robotics and Automation (ICRA), Workshop on Long-Term Autonomy, 2013. | |
2012 |
|
The single pixel GPS: Learning big data signals from tiny coresets (Conference) 20th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (GIS 2012), ACM, 2012. | |
Trajectory clustering for motion prediction (Conference) IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2012. | |