Daniel Feshbach, Alex Chi, Eric Huang, Diedra Krieger, Cynthia Sung
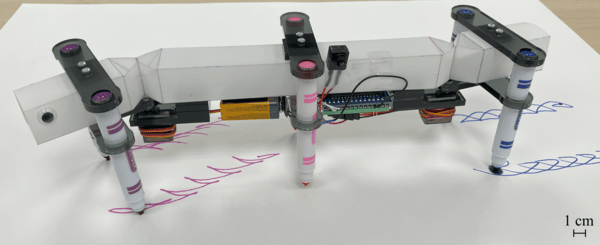
The abundance of connections between art and engineering are opportunities to engage artistically inclined students who may not think of themselves as interested in robotics, and to inspire engineering-inclined students to express themselves artistically. This work presents a tool kit and lesson plan for a hands-on introductory robotics activity centering how art and engineering influence each other. The Artistic Non-Inertial Tracer (ANT) is a three-link robot made of origami, which contacts the ground through markers that trace patterns as it slithers around. The design is capable of forward, turning, backward, and diagonal motion. Using origami for the body highlights the influence of art on engineering, and the gait traces are a visually interesting output of the engineering. The kit uses inexpensive components totaling about $26/robot USD (servos, origami, and an Arduino Nano) common in hobbyist communities so that learning how to use these components can empower further exploration of actuated art. Our associated lesson plan engages participants in the assembly and control of ANT and contextualizes it within a broader overview of robot system components and the use of origami in engineering. We successfully ran the lesson as a 3-hour outreach workshop at a local arts organization.
Full paper text available from ASEE: https://peer.asee.org/artistic-non-inertial-tracer-ant-an-educational-kit-for-a-3-link-origami-slithering-robot
Artistic Non-Inertial Tracer (ANT): an Educational Kit for a 3-Link Origami Slithering Robot (Conference) 2025 ASEE Annual Conference & Exposition, American Society for Engineering Education 2025. |
Fabrication and Code Files
- Body crease pattern: bodyCreasePattern.dwg
- Parts to laser cut from 6mm acrylic:
- Enough for 1 robot: acrylic6mmParts.dwg
- Enough for 8 robots, tightly packed on an 18″x24″ sheet: acrylic6mmParts_18x24inLayout_8robots.dwg
- Spacers to laser cut from 3mm acrylic (2, which is enough for 1 robot): acrylic3mm.dwg
- Arduino gait code: code_for_asee.zip
- Hex nut stabilizer: hexNutStabilizer.stl
Instructional Materials
- Body crease pattern folding video: part 1, part 2
- Presentation (background on origami robotics, assembly directions, and gait cycles): aseeAttachedSlides.pptx
Gait Videos
Gaits are written as tuples (amplitude, joint 1 center angle, joint 2 center angle, cycle duration, number of cycles) with angles in degrees and cycle duration (period) in seconds.
Acknowledgments
Support for this project has been provided by NSF Grant No. 2322898 and by The Arts League in West Philadelphia. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the funding source.