 | Unger, Gabriel; Patel, Saheli; Kozyak, Benjamin; Raney, Jordan R.; Sung, Cynthia Liebau Pumping Enables Valveless Soft Swimmer Robot (Conference) International Symposium on Experimental Robotics (ISER), 2025. @conference{Unger2025_Liebau_ISER,
title = {Liebau Pumping Enables Valveless Soft Swimmer Robot},
author = {Gabriel Unger and Saheli Patel and Benjamin Kozyak and Jordan R. Raney and Cynthia Sung},
year = {2025},
date = {2025-07-06},
urldate = {2025-07-09},
booktitle = {International Symposium on Experimental Robotics (ISER)},
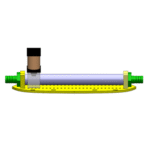
abstract = {Liebau pumping produces net directional flow via periodic
compression of a compliant tube at an asymmetric location, eliminat-
ing the need for valves or check flaps. While attractive for its simplicity,
this mechanism has rarely been explored for robotic propulsion. Here, we
present the first free-swimming robot actuated solely by Liebau pump-
ing. A soft silicone conduit is cyclically compressed off-center by a sin-
gle solenoid actuator, generating traveling pressure waves that produce
thrust. Directional control is achieved through simple frequency switch-
ing, enabling both forward and reverse swimming. Experimental results
reveal distinct frequency bands that correspond to the forward and re-
verse swimming modes, with peak velocities of 5.25 cm/s forward at 11 Hz
and –1.58 cm/s in reverse at 15 Hz using a 30% duty cycle and 1 A peak
current. Agility tests confirm smooth, responsive transitions between di-
rections without mechanical valves or moving parts. These results estab-
lish Liebau pumping as a viable, low-complexity propulsion method for
soft and ecologically safe underwater robots.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
Liebau pumping produces net directional flow via periodic
compression of a compliant tube at an asymmetric location, eliminat-
ing the need for valves or check flaps. While attractive for its simplicity,
this mechanism has rarely been explored for robotic propulsion. Here, we
present the first free-swimming robot actuated solely by Liebau pump-
ing. A soft silicone conduit is cyclically compressed off-center by a sin-
gle solenoid actuator, generating traveling pressure waves that produce
thrust. Directional control is achieved through simple frequency switch-
ing, enabling both forward and reverse swimming. Experimental results
reveal distinct frequency bands that correspond to the forward and re-
verse swimming modes, with peak velocities of 5.25 cm/s forward at 11 Hz
and –1.58 cm/s in reverse at 15 Hz using a 30% duty cycle and 1 A peak
current. Agility tests confirm smooth, responsive transitions between di-
rections without mechanical valves or moving parts. These results estab-
lish Liebau pumping as a viable, low-complexity propulsion method for
soft and ecologically safe underwater robots. |
 | Kim, Christopher; Yang, Zhiyuan; Mulay, Neel; Autullo, Kylie; Sung, Cynthia Salp-Inspired Bidirectional Jet Propulsion Swimmer with Self-Sensing (Workshop) IEEE International Conference on Robotics and Automation (ICRA), Workshop: 2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention, 2025. @workshop{kim2025selfsensing,
title = {Salp-Inspired Bidirectional Jet Propulsion Swimmer with Self-Sensing},
author = {Christopher Kim and Zhiyuan Yang and Neel Mulay and Kylie Autullo and Cynthia Sung},
url = {https://sites.google.com/andrew.cmu.edu/2nd-unconventional-robots/home},
year = {2025},
date = {2025-05-19},
urldate = {2025-05-19},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA), Workshop: 2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention},
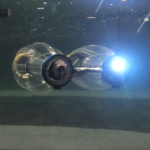
abstract = {Salps are efficient marine animals that swim via jet propulsion by infilling and expelling water from front and back apertures. Inspired by salps, we recently developed the soft jet-propelled SALP robot, where two SALPs can be physically connected into a two-SALP system for coordinated swimming. This work extends the platform by adding active front and rear valves to the single SALP robot to achieve both bidirectional propulsion and self-sensing using inductance and induced EMF. The valves are able to detect their own open or closed state and the jetting of a neighboring robot. This design will be able to support multi-robot coordination without external sensors or centralized control. },
keywords = {},
pubstate = {published},
tppubtype = {workshop}
}
Salps are efficient marine animals that swim via jet propulsion by infilling and expelling water from front and back apertures. Inspired by salps, we recently developed the soft jet-propelled SALP robot, where two SALPs can be physically connected into a two-SALP system for coordinated swimming. This work extends the platform by adding active front and rear valves to the single SALP robot to achieve both bidirectional propulsion and self-sensing using inductance and induced EMF. The valves are able to detect their own open or closed state and the jetting of a neighboring robot. This design will be able to support multi-robot coordination without external sensors or centralized control. |
 | Unger, Gabriel; Patel, Saheli; Kozyak, Benjamin; Raney, Jordan R.; Sung, Cynthia Bioinspired Valveless Swimming Through Liebau Pumping: A Soft Robotic Propulsion Strategy (Workshop) IEEE International Conference on Robotics and Automation (ICRA), Workshop: 2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention, 2025. @workshop{Unger2025_Liebau_ICRA,
title = {Bioinspired Valveless Swimming Through Liebau Pumping: A Soft Robotic Propulsion Strategy},
author = {Gabriel Unger and Saheli Patel and Benjamin Kozyak and Jordan R. Raney and Cynthia Sung},
url = {https://sites.google.com/andrew.cmu.edu/2nd-unconventional-robots/home},
year = {2025},
date = {2025-05-19},
urldate = {2025-05-19},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA), Workshop: 2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention},
abstract = {Abstract— Liebau pumping describes a valve-free principle of fluid transport in which a compliant tube is rhythmically compressed off-center to generate net flow. Initially recognized in embryonic heart studies, the approach has mostly been investigated in laboratory test rigs but has not been broadly applied for locomotion. This work introduces a fully submersible robot that achieves valveless propulsion using Liebau pumping, offering a quiet, bioinspired alternative to traditional propellers and oscillatory fins. We experimentally characterize how key actuation factors—frequency, duty cycle, waveform, and force amplitude—affect both throughput in a benchtop loop and swimming performance in open water. Bench experiments reveal peak flow rates of approximately 1.2 L/min near 10–15 Hz, while a soft underwater prototype achieves forward motion by operating at 2 Hz and 20% duty cycle. We observe negative net flow at certain mid-range frequencies, highlighting the intricate dynamics of wave reflection and fluid inertia. These findings suggest Liebau pumping can provide noise-minimized, potentially bidirectional propulsion for soft underwater robotics.},
keywords = {},
pubstate = {published},
tppubtype = {workshop}
}
Abstract— Liebau pumping describes a valve-free principle of fluid transport in which a compliant tube is rhythmically compressed off-center to generate net flow. Initially recognized in embryonic heart studies, the approach has mostly been investigated in laboratory test rigs but has not been broadly applied for locomotion. This work introduces a fully submersible robot that achieves valveless propulsion using Liebau pumping, offering a quiet, bioinspired alternative to traditional propellers and oscillatory fins. We experimentally characterize how key actuation factors—frequency, duty cycle, waveform, and force amplitude—affect both throughput in a benchtop loop and swimming performance in open water. Bench experiments reveal peak flow rates of approximately 1.2 L/min near 10–15 Hz, while a soft underwater prototype achieves forward motion by operating at 2 Hz and 20% duty cycle. We observe negative net flow at certain mid-range frequencies, highlighting the intricate dynamics of wave reflection and fluid inertia. These findings suggest Liebau pumping can provide noise-minimized, potentially bidirectional propulsion for soft underwater robotics. |
 | Yang, Zhiyuan; Zhang, Yipeng; Herbert, Matthew; Hsieh, M. Ani; Sung, Cynthia Effect of Jet Coordination on Underwater Propulsion with the Multi-Robot SALP System (Conference) IEEE 8th International Conference on Soft Robotics (RoboSoft), Lausanne, Switzerland, pp. 1-8, 2025. @conference{yang2025salp,
title = {Effect of Jet Coordination on Underwater Propulsion with the Multi-Robot SALP System},
author = {Zhiyuan Yang and Yipeng Zhang and Matthew Herbert and M. Ani Hsieh and Cynthia Sung},
url = {https://www.youtube.com/watch?v=mzd1QCXssCk
https://repository.upenn.edu/handle/20.500.14332/61048},
doi = {10.1109/RoboSoft63089.2025.11020967},
year = {2025},
date = {2025-04-23},
urldate = {2025-04-23},
booktitle = {IEEE 8th International Conference on Soft Robotics (RoboSoft), Lausanne, Switzerland, pp. 1-8},
abstract = {Salps, marine invertebrates known for their collective swimming through coordinated jet propulsion, offer a unique model for efficient underwater movement. Inspired by this biological system, we develop the SALP (Salp-inspired Approach to Low-energy Propulsion) robot, a soft underwater robot that swims via jet propulsion similarly to a biological salp. The SALPs can be physically connected into SALP chains and coordinate their jets to achieve various propulsion modes. In our experiments, we compare the swimming performance of the individual SALP with the two-SALP system, focusing on power, acceleration, velocity, and energy efficiency. Results indicate that two SALPs swimming synchronously exhibit a 9.0% increase in steady-state velocity and a 16.6% improvement in transient acceleration compared to a single SALP. Additionally, our analysis of swimming efficiency implies that asynchronous swimming is potentially more energy efficient than the synchronous mode, as reflected by a decrease in the cost of transport (COT).},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
Salps, marine invertebrates known for their collective swimming through coordinated jet propulsion, offer a unique model for efficient underwater movement. Inspired by this biological system, we develop the SALP (Salp-inspired Approach to Low-energy Propulsion) robot, a soft underwater robot that swims via jet propulsion similarly to a biological salp. The SALPs can be physically connected into SALP chains and coordinate their jets to achieve various propulsion modes. In our experiments, we compare the swimming performance of the individual SALP with the two-SALP system, focusing on power, acceleration, velocity, and energy efficiency. Results indicate that two SALPs swimming synchronously exhibit a 9.0% increase in steady-state velocity and a 16.6% improvement in transient acceleration compared to a single SALP. Additionally, our analysis of swimming efficiency implies that asynchronous swimming is potentially more energy efficient than the synchronous mode, as reflected by a decrease in the cost of transport (COT). |
 | Yang, Zhiyuan; Sung, Cynthia Bio-Inspired Approach to Energetically Efficient Jet Propulsion (Workshop) 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft), Workshop: Soft Robotics Inspired Biology, 2024. @workshop{yang2024swimmer,
title = {Bio-Inspired Approach to Energetically Efficient Jet Propulsion},
author = {Zhiyuan Yang and Cynthia Sung},
url = {https://www.colorado.edu/lab/jayaram/RoboSoft2024},
year = {2024},
date = {2024-04-14},
urldate = {2024-04-14},
booktitle = {7th IEEE-RAS International Conference on Soft Robotics (RoboSoft), Workshop: Soft Robotics Inspired Biology},
keywords = {},
pubstate = {published},
tppubtype = {workshop}
}
|
 | Chen, Guanyu; Chen, Dongsheng; Weakly, Jessica; Sung, Cynthia Drag coefficient characterization of the origami magic ball (Proceedings Article) In: ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), pp. DETC2023-117182, 2023. @inproceedings{chen2023drag,
title = {Drag coefficient characterization of the origami magic ball},
author = {Guanyu Chen and Dongsheng Chen and Jessica Weakly and Cynthia Sung},
url = {https://repository.upenn.edu/grasp_papers/73},
doi = {10.1115/DETC2023-117182},
year = {2023},
date = {2023-08-29},
urldate = {2023-08-29},
booktitle = {ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE)},
pages = {DETC2023-117182},
abstract = {The drag coefficient plays a vital role in the design and optimization of robots that move through fluids. From aircraft to underwater vehicles, their geometries are specially engineered so that the drag coefficients are as low as possible to achieve energy-efficient performances. Origami magic balls are 3-dimensional reconfigurable geometries composed of repeated simple waterbomb units. Their volumes can change as their geometries vary and we have used this concept in a recent underwater robot design. This paper characterizes the drag coefficient of an origami magic ball in a wind tunnel. Through dimensional analysis, the scenario where the robot swims underwater is equivalently transferred to the situation when it is in the wind tunnel. With experiments, we have collected and analyzed the drag force data. It is concluded that the drag coefficient of the magic ball increases from around 0.64 to 1.26 as it transforms from a slim ellipsoidal shape to an oblate spherical shape. Additionally, three different magic balls produce increases in the drag coefficient of between 57% and 86% on average compared to the smooth geometries of the same size and aspect ratio. The results will be useful in future designs of robots using waterbomb origami in fluidic environments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The drag coefficient plays a vital role in the design and optimization of robots that move through fluids. From aircraft to underwater vehicles, their geometries are specially engineered so that the drag coefficients are as low as possible to achieve energy-efficient performances. Origami magic balls are 3-dimensional reconfigurable geometries composed of repeated simple waterbomb units. Their volumes can change as their geometries vary and we have used this concept in a recent underwater robot design. This paper characterizes the drag coefficient of an origami magic ball in a wind tunnel. Through dimensional analysis, the scenario where the robot swims underwater is equivalently transferred to the situation when it is in the wind tunnel. With experiments, we have collected and analyzed the drag force data. It is concluded that the drag coefficient of the magic ball increases from around 0.64 to 1.26 as it transforms from a slim ellipsoidal shape to an oblate spherical shape. Additionally, three different magic balls produce increases in the drag coefficient of between 57% and 86% on average compared to the smooth geometries of the same size and aspect ratio. The results will be useful in future designs of robots using waterbomb origami in fluidic environments. |
 | Yang, Zhiyuan; Chen, Dongsheng; Levine, David J.; Sung, Cynthia Origami-inspired robot that swims via jet propulsion (Journal Article) In: IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7145-7152, 2021. @article{yang2021origami,
title = {Origami-inspired robot that swims via jet propulsion},
author = {Zhiyuan Yang and Dongsheng Chen and David J. Levine and Cynthia Sung},
url = {https://repository.upenn.edu/grasp_papers/68
https://youtu.be/cZ1nx_kOw3w},
doi = {10.1109/LRA.2021.3097757},
year = {2021},
date = {2021-07-19},
urldate = {2021-07-19},
booktitle = {IEEE Robotics and Automation Letters},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {4},
pages = {7145-7152},
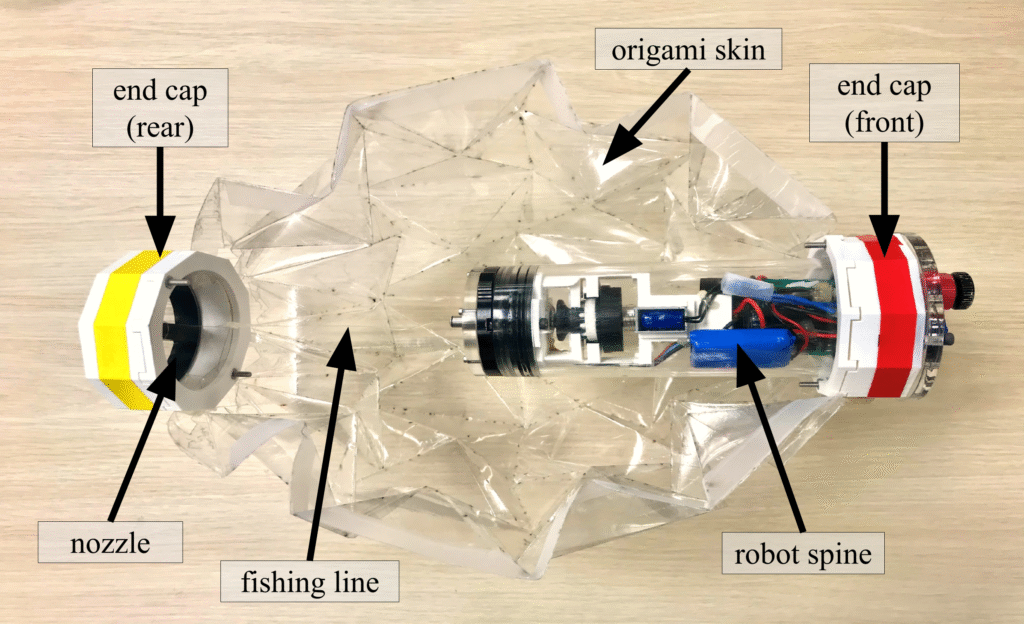
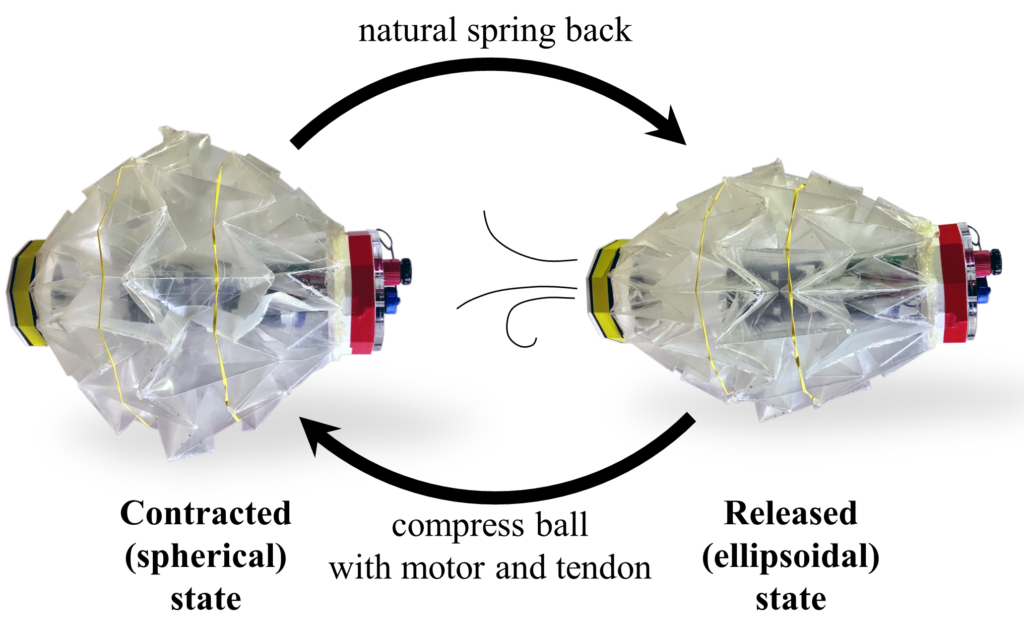
abstract = {Underwater swimmers present unique opportunities for using bodily reconfiguration for self propulsion. Origami-inspired designs are low-cost, fast to fabricate, robust, and can be used to create compliant mechanisms useful in energy efficient underwater locomotion. In this paper, we demonstrate an origami-inspired robot that can change its body shape to ingest and expel water, creating a jet that propels it forward similarly to cephalopods. We use the magic ball origami pattern, which can transform between ellipsoidal (low volume) and spherical (high volume) shapes. A custom actuation mechanism contracts the robot to take in fluid, and the inherent mechanics of the magic ball returns the robot to its natural shape upon release. We describe the design and control of this robot and verify its locomotion in a water tank. The resulting robot is able to move forward at 6.7 cm/s (0.2 body lengths/s), with a cost of transport of 2.0. },
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Underwater swimmers present unique opportunities for using bodily reconfiguration for self propulsion. Origami-inspired designs are low-cost, fast to fabricate, robust, and can be used to create compliant mechanisms useful in energy efficient underwater locomotion. In this paper, we demonstrate an origami-inspired robot that can change its body shape to ingest and expel water, creating a jet that propels it forward similarly to cephalopods. We use the magic ball origami pattern, which can transform between ellipsoidal (low volume) and spherical (high volume) shapes. A custom actuation mechanism contracts the robot to take in fluid, and the inherent mechanics of the magic ball returns the robot to its natural shape upon release. We describe the design and control of this robot and verify its locomotion in a water tank. The resulting robot is able to move forward at 6.7 cm/s (0.2 body lengths/s), with a cost of transport of 2.0. |