Our lab’s research in origami‐inspired robotics extends into the medical arena through collaborations with the University of Pennsylvania Hospital and the Children’s Hospital of Philadelphia, including partnerships with the Departments of Cardiology and Plastic Surgery. We also work closely with faculty such as Prof. Jordan Raney (MEAM) and Prof. Flavia Vitale (Penn’s Center for Neuroengineering & Therapeutics). These efforts focus on reconfigurable implants, artificial muscles, and soft actuators for medical devices.
A central goal is to develop origami-inspired soft actuators that function as artificial muscles, leveraging advanced fabrication techniques to enable compact, flexible, and highly robust motion. By incorporating principles such as multistability and bistability from origami, we design actuator systems that can be easily reconfigured yet remain strong enough to perform clinically relevant tasks. Our lab also leads work on mechanical characterization of origami-inspired tubular structures for use as reconfigurable implants, aiming to reduce surgical invasiveness by creating implantable devices (e.g., heart or bile duct stents) that can be adjusted noninvasively.
In parallel, our lab is developing algorithms and interactive design tools for kinematic mechanisms, with the goal of enabling the rapid and affordable creation of customized orthotics and prosthetics. These computational tools are intended to streamline the design process for patient-specific assistive devices, broadening access to personalized care.
MORF in Medical Applications
Our MORF (Magnetic Origami Reprogramming and Folding) System—initially developed for general reconfigurable devices—has proven especially promising for medical stents. Recently, in Penn’s Y-Prize competition, the 2025 winners “Stentix” proposed a magnetically reconfigurable biliary stent based on MORF. By using magnetic forces, this stent can be adjusted in position and diameter from outside the body, helping maintain bile flow without repeat endoscopies
Related Publications
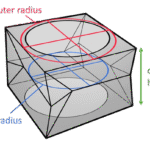 | Leung, Brianna; Unger, Gabriel; Escorza, Saúl; Chen, Jonathan; Fogel, Mark; Sung, Cynthia Mechanical Characterization of an Origami-Inspired Multistable Tube for Reconfigurable Implants, (Conference) Biomedical Engineering Society’s (BMES) Annual Meeting, 2024. @conference{LeungBMES,
title = {Mechanical Characterization of an Origami-Inspired Multistable Tube for Reconfigurable Implants,},
author = {Brianna Leung and Gabriel Unger and Saúl Escorza and Jonathan Chen and Mark Fogel and Cynthia Sung},
year = {2024},
date = {2024-10-23},
urldate = {2024-10-23},
booktitle = {Biomedical Engineering Society’s (BMES) Annual Meeting},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
|
 | Kim, Christopher; Yang, Lele; Anbuchelvan, Ashwath; Garg, Raghav; Milbar, Niv; Vitale, Flavia; Sung, Cynthia Origami-Inspired Bistable Gripper with Self-Sensing Capabilities (Conference) IEEE-RAS International Conference on Soft Robotics (Robosoft), 2024. @conference{kim2024origami,
title = {Origami-Inspired Bistable Gripper with Self-Sensing Capabilities},
author = {Christopher Kim and Lele Yang and Ashwath Anbuchelvan and Raghav Garg and Niv Milbar and Flavia Vitale and Cynthia Sung},
url = {https://www.youtube.com/watch?v=7BFJBbKCvJU
https://repository.upenn.edu/entities/publication/f2892aab-8294-4e97-bd3e-3d77590c5b1e},
doi = {10.1109/RoboSoft60065.2024.10522014},
year = {2024},
date = {2024-04-13},
urldate = {2024-04-13},
booktitle = {IEEE-RAS International Conference on Soft Robotics (Robosoft)},
abstract = {An origami-inspired bistable gripper, featuring a dual-function custom PET linear solenoid actuator that acts both as an actuator and a sensor, is presented. Movements in the permanent magnet plunger, which is directly mounted to the gripper, create induced electromotive force (emf) in the solenoid, and these induced emf measurements are used to detect snap-through actions and light contacts on the gripper. The fabrication methods for the gripper, actuator, and a gel-free soft wearable EMG electrode are outlined, and the actuator’s self-sensing method utilizing the time-integral of the induced emf measurements are explored. Because a self-sensing actuator eliminates the need for extra sensors, it allows for further miniaturization of the robot while maintaining its compactness and lightweight design. The paper also introduces a full human-in-the-loop system, allowing users to open or close the gripper with their biceps via a wearable EMG electrode. This system bridges human intent with robotic action, offering a more intuitive interaction model for robotic control.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
An origami-inspired bistable gripper, featuring a dual-function custom PET linear solenoid actuator that acts both as an actuator and a sensor, is presented. Movements in the permanent magnet plunger, which is directly mounted to the gripper, create induced electromotive force (emf) in the solenoid, and these induced emf measurements are used to detect snap-through actions and light contacts on the gripper. The fabrication methods for the gripper, actuator, and a gel-free soft wearable EMG electrode are outlined, and the actuator’s self-sensing method utilizing the time-integral of the induced emf measurements are explored. Because a self-sensing actuator eliminates the need for extra sensors, it allows for further miniaturization of the robot while maintaining its compactness and lightweight design. The paper also introduces a full human-in-the-loop system, allowing users to open or close the gripper with their biceps via a wearable EMG electrode. This system bridges human intent with robotic action, offering a more intuitive interaction model for robotic control. |
Current Personnel
- Gabriel Unger (MEAM PhD)
- Kayleen Smith (MEAM Undergrad)
- Kylie Autullo (MEAM Undergrad)
Past Personnel
- Christopher Kim (MEAM PhD)
- Brianna Leung (BE Undergrad)
- Harita Trivedi (BE Undergrad)
- Alec Lanter (MEAM Master's)
- Louis Beardell (University of Michigan, BE Visitor)
- Serena Carson (ROBO Master's)
Collaborations
We gratefully acknowledge the collaboration with Prof. Jordan Raney (MEAM, UPenn) and Prof. Flavia Vitale (Penn’s Center for Neuroengineering & Therapeutics).
Acknowledgments and Funding Sources
This work was supported in part by the Johnson & Johnson WiSTEM2D program, by the Children’s Hospital of Philadelphia (CHOP) Cardiac Innovation program, by the Penn Health-Tech program, and by the Penn Center for Undergraduate Research and Fellowships. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of funding source.
