Overview
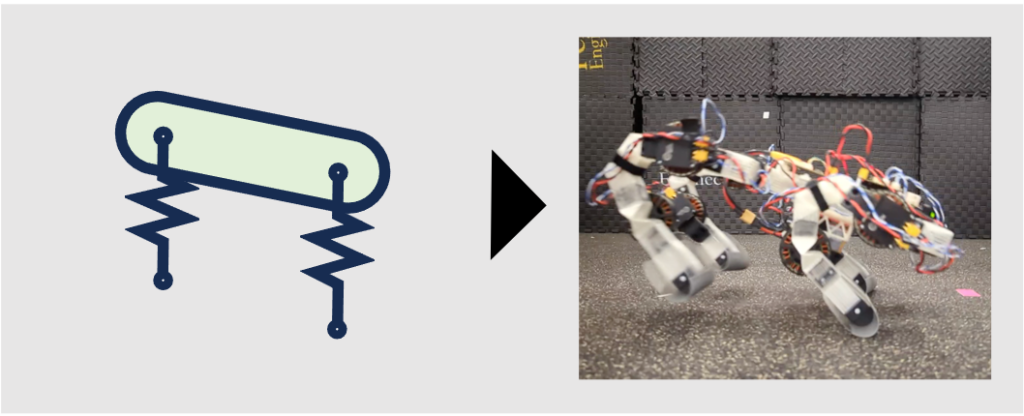
Designing robots requires a careful balance between their physical structure and behavior, as modifications in one area typically necessitate changes in the other. To enhance this design process, we introduce a co-design strategy that integrates modularization and abstraction, specifically focusing on the Dynamic Origami Quadruped (DOQ). This method aims to simplify design decisions by minimizing the interactions between components, enabling the creation of versatile robots while reducing the complexity of choices required from designers.
Our approach is grounded in two key concepts. The first involves utilizing dynamical systems templates to abstract essential locomotion dynamics, providing vital constraints that inform kinematics and actuation. The second concept is the Robogami (Kinegami) prototyping technique, which translates high-level specifications into feasible fabrication plans. Together, these frameworks streamline the design process, allowing designers to concentrate on overarching goals while automatically generating the specifics needed for successful prototypes. This work lays the groundwork for future innovations in robotics design.
Related Publications
 | Robogami Reveals the Utility of Slot-Hopper for Co-Design of DOQ’s Body and Behavior (Workshop) ICRA 2024 Workshop on Co-design in Robotics: Theory, Practice, and Challenges, 2024. |
 | Bio-inspired quadrupedal robot with passive paws through algorithmic origami design (Workshop) 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft) Workshop: Soft Robotics Inspired Biology, 2024. |
 | DOQ: A Dynamic Origami Quadrupedal Robot (Workshop) ICRA Workshop on Origami-based Structures for Designing Soft Robots with New Capabilities, 2023. |
Current Personnel
- Wei-Hsi Chen (ESE Postdoc)
- Dong Wook Kim (ROBO Staff)
- Henry Westfall (MEAM Undergrad)
- Lindsay Fabricant (MEAM, Wharton Undergrad)
- Sophie Abramovitz (MEAM Undergrad)
- Vanessa Gong (MEAM undergrad)
- Ken Suzuki (ROBO Master's)
Past Personnel
- Dhyey Shah (ROBO Master's)
- Natalie Anfuso (Stevens Institute of Technology Visitor)
- Solomon Gonzalez (MEAM Master's)
- Xueyang Qi (MEAM, ESE Master's)
Collaborators
We gratefully acknowledge this collaboration with Prof. Dan Koditschek (Kodlab, UPenn) and J. Diego Caporale (USC).
Acknowledgments and Funding Sources
This project has been supported by the National Science Foundation (NSF) under grants 2322898 and 1845339, by the Army Research Office (ARO) under Grant W911NF2410090 and the SLICE Multidisciplinary University Research Initiatives Program grant W911NF1810327. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of funding source.