TRUSSES: Temporarily, Robots Unite to Surmount Sandy Entrapments, then Separate
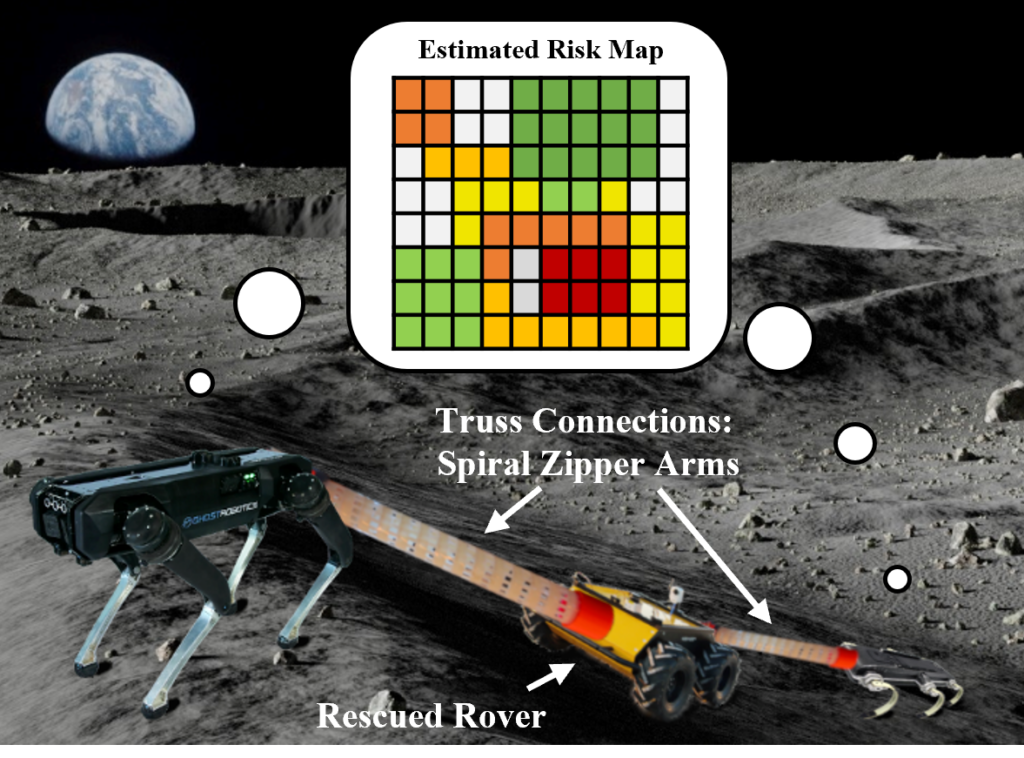
The aim for this project is to develop methods for teams of robots to jointly overcome environmental hazards on the Moon by attaching to each other to form larger and more stable, maneuverable structures. The robots will use their interactions with the ground to form a map of safe and risky terrain, attach to each other as support when the ground traversal risk is high, move in a coordinated fashion once joined, and, once the maneuver has been successfully completed, separate to continue their original individual missions.
The TRUSSES project will develop algorithms that provide robots with two main capabilities: 1) estimate robot-to-regolith interactions in order to plan safe maneuvers, and 2) plan truss formations and coordinated motions for robots to push and pull each other to safe locations. The system will be evaluated to verify risk estimation, risk avoidance, risk mitigation, and recovery from failure.
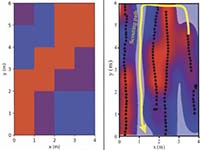
Our group primarily develops planning and localization methods for coordinated, risk-aware maneuvers in heterogeneous teams of ground robots operating with a partially known map. This map is built proprioceptively by an exploring quadruped and encodes spatial parameters for a robot-ground interaction model, enabling force prediction. It can also be transformed into a risk map that reflects uncertainty (unexplored regions) and poor terrain (where robots may get stuck). Heterogeneity is advantageous, as each robot interacts differently with the terrain, offering unique capabilities in team operations. This diversity requires high-level planning to assign roles aligned with each robot’s strengths, producing team configurations that support the rescue mission while avoiding high-risk zones. Once a target configuration is defined, robots reposition themselves using a reactive navigation planner and form truss connections. A truss-planner then computes joint motions so the connected network can move collectively to safer areas, where the robots can disconnect and resume individual tasks like exploration or transport.
@conference{holladay2025characterizing,
title = {Characterizing Robot-Ground Interactions for Autonomous Lunar Construction},
author = {Rachel Holladay and Shivangi Misra and Mason Mitchell and Akshay Ram Panyam and Erica Pauline Santos and J. Diego Caporale and Shipeng Liu and Yifeng Zhang and John Ruck and Douglas Jerolmack and Feifei Qian and Mark Yim and Cynthia Sung},
year = {2025},
date = {2025-07-07},
urldate = {2025-07-07},
booktitle = {International Symposium on Experimental Robotics (ISER)},
journal = {International Symposium on Experimental Robotics (ISER)},
abstract = {Autonomous construction in lunar environments will require robots to robustly navigate and transport loads across the lunar surface. In this paper, we investigate robot-ground interaction forces unique to LHS-1, a common lunar regolith simulant, to identify feasible motions and forces that the robot can achieve. We conduct three sets of experiments that characterize this force-terrain relationship by pushing and pulling a series of loads over variable terrain and evaluate our ability to actively improve the ground's traversability by applying force. },
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
Autonomous construction in lunar environments will require robots to robustly navigate and transport loads across the lunar surface. In this paper, we investigate robot-ground interaction forces unique to LHS-1, a common lunar regolith simulant, to identify feasible motions and forces that the robot can achieve. We conduct three sets of experiments that characterize this force-terrain relationship by pushing and pulling a series of loads over variable terrain and evaluate our ability to actively improve the ground's traversability by applying force.
@conference{panyam2025trusses,
title = {TRUSSES - A multi-robot collaborative experimental platform},
author = {Akshay Ram Panyam and Erica Pauline Santos and Andrik Puentes and Mingguang Yang and Mason Mitchell and Juan Diego Caporale and Shivangi Misra and Rachel Holladay and Cynthia Sung and Mark Yim},
year = {2025},
date = {2025-07-07},
urldate = {2025-07-07},
booktitle = {International Symposium on Experimental Robotics (ISER)},
abstract = {TRUSSES (Temporarily Robots Unite to Surmount Sandy Entrapment then Separate) is a multi-robot platform developed for the NASA LuSTR program to evaluate and experiment with mobility in lunar regolith. By using a combination of wheeled and legged robots with Spiral Zipper linear actuators to dock and assist each other, this system facilitates experimentation of physical collaboration of robots for improved mobility and resilience in lunar regolith. Experimental results show the ability to perform collaborative slope climbing maneuvers in controlled environments. Based on experimental results, future work will explore more adaptive locomotion control strategies for multi-robot systems in complex sand-like environments.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
TRUSSES (Temporarily Robots Unite to Surmount Sandy Entrapment then Separate) is a multi-robot platform developed for the NASA LuSTR program to evaluate and experiment with mobility in lunar regolith. By using a combination of wheeled and legged robots with Spiral Zipper linear actuators to dock and assist each other, this system facilitates experimentation of physical collaboration of robots for improved mobility and resilience in lunar regolith. Experimental results show the ability to perform collaborative slope climbing maneuvers in controlled environments. Based on experimental results, future work will explore more adaptive locomotion control strategies for multi-robot systems in complex sand-like environments.
@conference{liu2025scout,
title = {Scout-rover cooperation: Online terrain strength mapping and traversal risk estimation for planetary-analog explorations},
author = {Shipeng Liu and J. Diego Caporale and Ethan Fulcher and Wilson Hu and Natalie Cavallo and Yifeng Zhang and Xingue Liao and Cynthia Sung and Feifei Qian},
year = {2025},
date = {2025-03-11},
urldate = {2025-03-11},
booktitle = {Lunar and Planetary Science Conference (LPSC)},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
@conference{sung2024trusses,
title = {TRUSSES: Temporarily, Robots Unite to Surmount Sandy Entrapments, then Separate},
author = {Douglas Jerolmack and Daniel Koditschek and Feifei Qian and Mark Yim and Cynthia Sung},
year = {2024},
date = {2024-04-23},
urldate = {2024-04-23},
booktitle = {Lunar Surface Innovation Consortium Spring Meeting},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
The work is supported by Lunar Surface Technology Research grant #80NSSC24K0127 from NASA’s Space Technology Research Grants Program. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of this organization.