The emergence of smart actuators with tunable material properties has empowered roboticists to create systems capable of transitioning between rigid and soft operational modes. This adaptability allows robots to operate with high precision and enhanced payload capacity in their rigid state, while offering greater safety and flexibility when soft especially in the presence of unpredictable disturbances. We design these adaptive robotic systems and develop corresponding control algorithms to showcase the versatility and potential of this new class of reconfigurable robots.
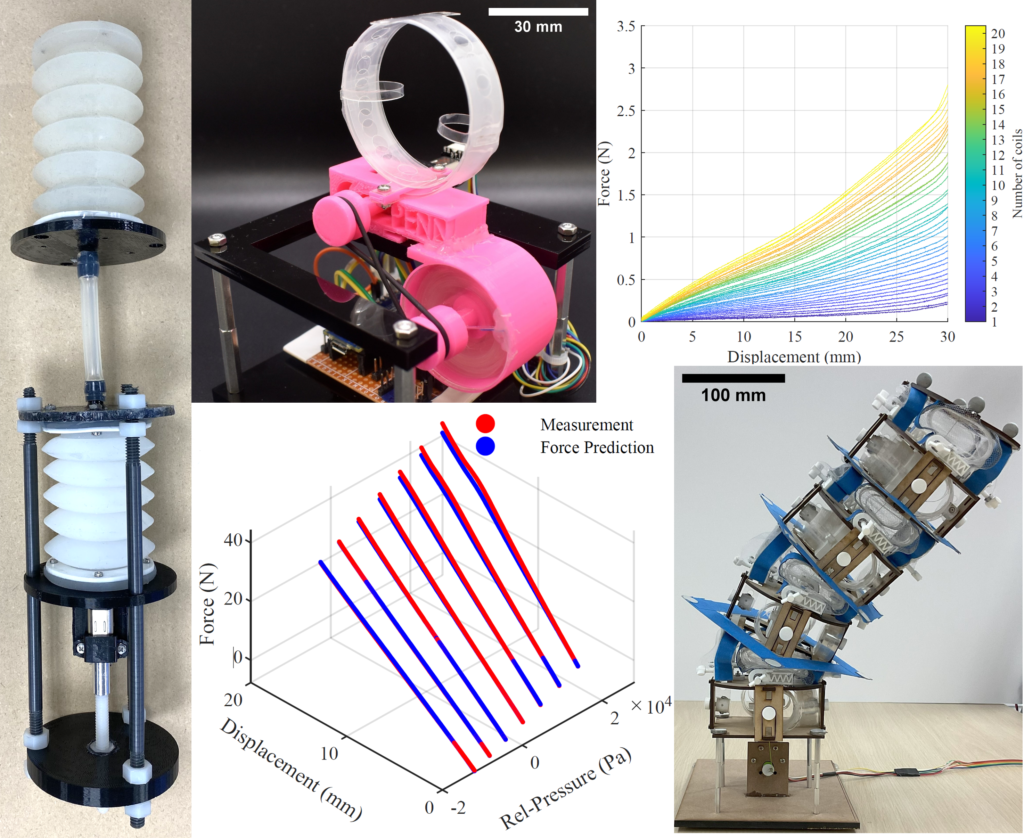
Fig 1: Collage of projects in the research thrust: Tunable Stiffness in Soft Robots
Coiled Spring Actuator
We have developed several novel tunable-stiffness actuators as part of this research thrust, one of which is the coiled-spring actuator. It is inspired by the mechanics of nested elastic rings, wherein the effective bulk stiffness can be modulated by varying the number of elastic coiled layers. This mechanism enables near-linear stiffness tuning, achieved through electro-mechanical control. The system allows for precise, programmable stiffness adjustments, and our prototype has demonstrated a tunability range of up to 20-fold. We have also constructed a non-dimensional mechanics model for the coiled spring actuator which extends to all such mechanisms of different dimensions and materials. The local stiffness changes from these actuators induce corresponding deformations in a compliant, segmented manipulator constructed as a tower of multiple such modules.
Pneumatic Dual-Bellows Actuator
Another novel tunable stiffness actuator developed in our lab is able to achieve a stiffness gain of 1.43 times (1332 N/m to 1913 N/m) without needing an external air source or valve. The design consists of an air chamber bellows and spring bellows connected to each other in an air-tight manner. Stiffness modulation in the spring bellows is achieved by altering the volume of the air chamber bellows. Due to large achievable stiffnesses, this actuator is suitable for integration in soft robots that are needed to demonstrate dynamic and adaptable behavior.
Hierarchical Algorithms to Optimize Soft Manipulator Mechanics
Stiffness control algorithms are needed for soft manipulators to be able to take effective advantage of embedded novel stiffness actuators. To address this, we have developed a hierarchical policy for stiffness control for a class of soft segmented manipulators. The stiffness changes induce desired deformations in each segment, thereby influencing the manipulator’s end-effector position. The algorithm can be run as an online controller to influence the manipulator’s stable states or offline as a design algorithm to optimize stiffness distributions.
Coupled Learning in Elastic Networks
We are also collaborating with Lauren Altman and Doug Durian in the Physics Department, School of Arts and Sciences, University of Pennsylvania to build an elastic network for coupled learning. This technique tunes the properties of individual elastic elements in the network to achieve specific outcomes, like applying the right force or strain to an output edge. These mechanical networks could be scaled and automated to tackle more complex tasks, opening the door to a new kind of smart metamaterial.
Related Publications
Misra, Shivangi; Sung, Cynthia
Online Optimization of Soft Manipulator Mechanics via Hierarchical Control (Conference)
7th IEEE-RAS International Conference on Soft Robotics (RoboSoft), 2024.
@conference{misra2024tsmb,
title = {Online Optimization of Soft Manipulator Mechanics via Hierarchical Control},
author = {Shivangi Misra and Cynthia Sung},
url = {https://youtu.be/DS2kEvccwYA?feature=shared
https://repository.upenn.edu/handle/20.500.14332/59590},
doi = {10.1109/RoboSoft60065.2024.10522004},
year = {2024},
date = {2024-04-14},
urldate = {2024-04-14},
booktitle = {7th IEEE-RAS International Conference on Soft Robotics (RoboSoft)},
abstract = {Actively tuning mechanical properties in soft robots is now feasible due to advancements in soft actuation technologies. In soft manipulators, these novel actuators can be distributed over the robot body to allow greater control over its large number of degrees of freedom and to stabilize local deformations against a range of disturbances. In this paper, we present a hierarchical policy for stiffness control for such a class of soft manipulators. The stiffness changes induce desired deformations in each segment, thereby influencing the manipulator’s end-effector position. The algorithm can be run as an online controller to influence the manipulator’s stable states – as we demonstrate in simulation – or offline as a design algorithm to optimize stiffness distributions – as we showcase in a hardware demonstration. Our proposed hierarchical control scheme is agnostic to the stiffness actuation method and can extend to other soft manipulators with nonuniform stiffness distributions.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
Actively tuning mechanical properties in soft robots is now feasible due to advancements in soft actuation technologies. In soft manipulators, these novel actuators can be distributed over the robot body to allow greater control over its large number of degrees of freedom and to stabilize local deformations against a range of disturbances. In this paper, we present a hierarchical policy for stiffness control for such a class of soft manipulators. The stiffness changes induce desired deformations in each segment, thereby influencing the manipulator’s end-effector position. The algorithm can be run as an online controller to influence the manipulator’s stable states – as we demonstrate in simulation – or offline as a design algorithm to optimize stiffness distributions – as we showcase in a hardware demonstration. Our proposed hierarchical control scheme is agnostic to the stiffness actuation method and can extend to other soft manipulators with nonuniform stiffness distributions.
@conference{chen2024design,
title = {Design and Characterization of a Pneumatic Tunable-Stiffness Bellows Actuator},
author = {Rongqian Chen and Jun Kwon and Wei-Hsi Chen and Cynthia Sung},
doi = {10.1109/RoboSoft60065.2024.10521916},
year = {2024},
date = {2024-04-13},
urldate = {2024-04-13},
booktitle = {IEEE-RAS International Conference on Soft Robotics (RoboSoft)},
abstract = {We introduce a self-contained pneumatic actuator capable of 1.43 times stiffness gain from 1332 N/m to 1913 N/m without needing an external air source or valve. The design incorporates an air chamber bellows and a spring bellows, connected and sealed. Stiffness modulation is achieved by altering the air chamber volume. We present an approach for computing the volume, pressurized force, and stiffness of a single bellows component, as well as methods for composing single bellows models to predict the change in stiffness of the dual bellows actuator as a function of air chamber compression. We detail the fabrication of the actuator and verify the models on the fabricated prototype. This actuator holds promise for future integration in tunable stiffness robots demanding high strength and adaptability in dynamic scenarios.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
We introduce a self-contained pneumatic actuator capable of 1.43 times stiffness gain from 1332 N/m to 1913 N/m without needing an external air source or valve. The design incorporates an air chamber bellows and a spring bellows, connected and sealed. Stiffness modulation is achieved by altering the air chamber volume. We present an approach for computing the volume, pressurized force, and stiffness of a single bellows component, as well as methods for composing single bellows models to predict the change in stiffness of the dual bellows actuator as a function of air chamber compression. We detail the fabrication of the actuator and verify the models on the fabricated prototype. This actuator holds promise for future integration in tunable stiffness robots demanding high strength and adaptability in dynamic scenarios.
@conference{misra2023design,
title = {Design and Control of a Tunable-Stiffness Coiled-Spring Actuator},
author = {Shivangi Misra and Mason Mitchell and Rongqian Chen and Cynthia Sung},
url = {https://repository.upenn.edu/grasp_papers/72/
https://youtu.be/52WVMEeGxUk
},
doi = {10.1109/ICRA48891.2023.10161218},
year = {2023},
date = {2023-05-30},
urldate = {2023-05-30},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
abstract = {We propose a novel design for a lightweight and compact tunable stiffness actuator capable of stiffness changes up to 20x. The design is based on the concept of a coiled spring, where changes in the number of layers in the spring change the bulk stiffness in a near-linear fashion. We present an elastica nested rings model for the deformation of the proposed actuator and empirically verify that the designed stiffness-changing spring abides by this model. Using the resulting model, we design a physical prototype of the tunable-stiffness coiled spring actuator and discuss the effect of design choices on the resulting achievable stiffness range and resolution. In the future, this actuator design could be useful in a wide variety of soft robotics applications, where fast, controllable, and local stiffness change is required over a large range of stiffnesses.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
We propose a novel design for a lightweight and compact tunable stiffness actuator capable of stiffness changes up to 20x. The design is based on the concept of a coiled spring, where changes in the number of layers in the spring change the bulk stiffness in a near-linear fashion. We present an elastica nested rings model for the deformation of the proposed actuator and empirically verify that the designed stiffness-changing spring abides by this model. Using the resulting model, we design a physical prototype of the tunable-stiffness coiled spring actuator and discuss the effect of design choices on the resulting achievable stiffness range and resolution. In the future, this actuator design could be useful in a wide variety of soft robotics applications, where fast, controllable, and local stiffness change is required over a large range of stiffnesses.
@conference{misra2022forward,
title = {Forward kinematics and control of a segmented tunable-stiffness 3-D continuum manipulator},
author = {Shivangi Misra and Cynthia Sung},
url = {https://repository.upenn.edu/grasp_papers/69/
https://youtu.be/P-vg3Hiuk4M
https://youtu.be/lc6W61xCWuQ},
doi = {10.1109/ICRA46639.2022.9812098},
year = {2022},
date = {2022-05-23},
urldate = {2022-05-23},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
abstract = {In this work, we consider the problem of controlling the end effector position of a continuum manipulator through local stiffness changes. Continuum manipulators offer the advantage of continuous deformation along their lengths, and recent advances in smart material actuators further enable local compliance changes, which can affect the manipulator's bulk motion. However, leveraging local stiffness change to control motion remains lightly explored. We build a kinematic model of a continuum manipulator as a sequence of segments consisting of symmetrically arranged springs around the perimeter of every segment, and we show that this system has a closed form solution to its forward kinematics. The model includes common constraints such as restriction of torsional or shearing movement. Based on this model, we propose a controller on the spring stiffnesses for a single segment and provide provable guarantees on convergence to a desired goal position. The results are verified in simulation and compared to physical hardware.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
In this work, we consider the problem of controlling the end effector position of a continuum manipulator through local stiffness changes. Continuum manipulators offer the advantage of continuous deformation along their lengths, and recent advances in smart material actuators further enable local compliance changes, which can affect the manipulator's bulk motion. However, leveraging local stiffness change to control motion remains lightly explored. We build a kinematic model of a continuum manipulator as a sequence of segments consisting of symmetrically arranged springs around the perimeter of every segment, and we show that this system has a closed form solution to its forward kinematics. The model includes common constraints such as restriction of torsional or shearing movement. Based on this model, we propose a controller on the spring stiffnesses for a single segment and provide provable guarantees on convergence to a desired goal position. The results are verified in simulation and compared to physical hardware.
Support for these projects has been provided by the National Science Foundation (NSF) Grant No. 1845339, the Johnson & Johnson WiSTEM2D Scholars Program, and the Army Research Office (ARO) under MURI award #W911NF1810327. Any opinions, findings, conclusions, or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of funding source.