This project thrust introduces self-sensing actuators that merge actuation and sensing into a single component, enabling reductions in the size and weight of soft robots. Three self-sensing actuators—the I-cord knitted SMA (ICKS) actuator, the custom PET solenoid actuator from the Facial Reanimation and Bistable Gripper project, and a miniaturized tunable stiffness solenoid actuator—will showcase the self-sensing actuation capability.
Videos
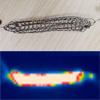
I-cord Knitted SMA (ICKS) Actuator
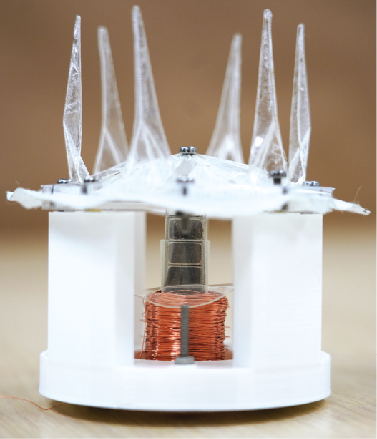
Origami-Inspired Bistable Gripper with the Custom PET Solenoid Actuator
@conference{kim2024origami,
title = {Origami-Inspired Bistable Gripper with Self-Sensing Capabilities},
author = {Christopher Kim and Lele Yang and Ashwath Anbuchelvan and Raghav Garg and Niv Milbar and Flavia Vitale and Cynthia Sung},
url = {https://www.youtube.com/watch?v=7BFJBbKCvJU
https://repository.upenn.edu/entities/publication/f2892aab-8294-4e97-bd3e-3d77590c5b1e},
doi = {10.1109/RoboSoft60065.2024.10522014},
year = {2024},
date = {2024-04-13},
urldate = {2024-04-13},
booktitle = {IEEE-RAS International Conference on Soft Robotics (Robosoft)},
abstract = {An origami-inspired bistable gripper, featuring a dual-function custom PET linear solenoid actuator that acts both as an actuator and a sensor, is presented. Movements in the permanent magnet plunger, which is directly mounted to the gripper, create induced electromotive force (emf) in the solenoid, and these induced emf measurements are used to detect snap-through actions and light contacts on the gripper. The fabrication methods for the gripper, actuator, and a gel-free soft wearable EMG electrode are outlined, and the actuator’s self-sensing method utilizing the time-integral of the induced emf measurements are explored. Because a self-sensing actuator eliminates the need for extra sensors, it allows for further miniaturization of the robot while maintaining its compactness and lightweight design. The paper also introduces a full human-in-the-loop system, allowing users to open or close the gripper with their biceps via a wearable EMG electrode. This system bridges human intent with robotic action, offering a more intuitive interaction model for robotic control.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
An origami-inspired bistable gripper, featuring a dual-function custom PET linear solenoid actuator that acts both as an actuator and a sensor, is presented. Movements in the permanent magnet plunger, which is directly mounted to the gripper, create induced electromotive force (emf) in the solenoid, and these induced emf measurements are used to detect snap-through actions and light contacts on the gripper. The fabrication methods for the gripper, actuator, and a gel-free soft wearable EMG electrode are outlined, and the actuator’s self-sensing method utilizing the time-integral of the induced emf measurements are explored. Because a self-sensing actuator eliminates the need for extra sensors, it allows for further miniaturization of the robot while maintaining its compactness and lightweight design. The paper also introduces a full human-in-the-loop system, allowing users to open or close the gripper with their biceps via a wearable EMG electrode. This system bridges human intent with robotic action, offering a more intuitive interaction model for robotic control.
@conference{kim2021sma,
title = {Fabrication and characterization of I-cord knitted SMA actuators},
author = {Christopher Kim and Athena Chien and Megha Tippur and Cynthia Sung},
url = {https://www.youtube.com/watch?v=Czoy5NctBtY
https://repository.upenn.edu/meam_papers/308/
},
doi = {10.1109/RoboSoft51838.2021.9479207},
year = {2021},
date = {2021-04-01},
urldate = {2021-04-01},
booktitle = {IEEE International Conference on Soft Robotics (RoboSoft)},
pages = {379-386},
abstract = {Knitted SMA actuators provide greater actuation stroke than single-strand SMA wire actuators by leveraging its knitted structure. However, due to short-circuiting through interlacing knit loops, existing knitted SMA sheet actuators are unsuitable for joule-heating actuation when uniform contractile actuation is desired. We explore an axially symmetric tubular i-cord knitted actuator as a possible solution. The fabrication process of an i-cord knitted SMA actuator and its electrical, thermal, and mechanics models are presented. After modifying existing models for single-strand SMA wire and adjusting their parameters, the proposed electrical, thermal, and mechanics models were verified with experimental results.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
Knitted SMA actuators provide greater actuation stroke than single-strand SMA wire actuators by leveraging its knitted structure. However, due to short-circuiting through interlacing knit loops, existing knitted SMA sheet actuators are unsuitable for joule-heating actuation when uniform contractile actuation is desired. We explore an axially symmetric tubular i-cord knitted actuator as a possible solution. The fabrication process of an i-cord knitted SMA actuator and its electrical, thermal, and mechanics models are presented. After modifying existing models for single-strand SMA wire and adjusting their parameters, the proposed electrical, thermal, and mechanics models were verified with experimental results.
Support for this project has been provided in part by the National Science Foundation (NSF) grant #EEC-1659190, by the Johnson \& Johnson WiSTEM2D program, by the University of Pennsylvania through the Center for Precision Engineering for Health, and by the Edwin and Fannie Gray Hall Center for Human Appearance Research and Education Fund. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and and do not necessarily reflect the views of funding source.