2025 |
|
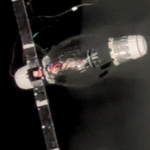
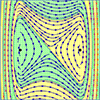
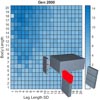
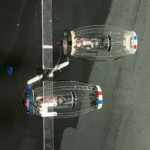 | Yang, Zhiyuan; Zhang, Yipeng; Li, Jingshuo; Mulay, Neel; Hsieh, M. Ani; Sutherland, Kelly R.; Arratia, Paulo E.; Sung, Cynthia Coupled Jet Coordination and Physical Arrangement in Salp-Inspired Multi-Robot Swimming (Journal Article) In: Bioinspiration & Biomimetics, vol. 20, iss. RoboTwin, no. 6, pp. 066010, 2025. @article{yang2025coupled,Salps are underwater invertebrates considered to be among the world’s most energy-efficient examples of jet propulsion. They can swim as solitary individuals or as physically connected colonies, coordinating their jets to produce collective movement. Inspired by salps, we developed the SALP (Salp-inspired Approach to Low-energy Propulsion) system, where individual SALP robots can be physically connected into a multi-SALP group, and we investigate the coupled effects of physical arrangement and jet coordination on the swimming performance and energy efficiency of a two-SALP system. We conduct free swimming tests to evaluate locomotion performance metrics and find that the two-SALP system, when properly coordinated, is able to swim with 15.7% higher speed and 11.3% lower cost of transport than the single SALP. Supporting flow characterization experiments using particle image velocimetry (PIV) reveal vortex ring structures emanating from robot SALP nozzles. The data suggest that propulsion performance is affected by the spatial arrangement of the vortex ring structure. In particular, we find that SALP systems that produce a parallel vortex ring arrangement produce less vortex circulation and impulse than an in-series vortex ring arrangement. Overall, the SALP system is a useful platform for exploring salp-inspired multi-jet locomotion strategies, enabling decoupling of physical and control parameters to expose underlying locomotion physics in ways that are difficult with the biological salp. These insights advance our understanding of multi-jet locomotion and support the development of more energy-efficient jet-propelled underwater robots in the future. |
 | Patel, Saheli; Unger, Gabriel; Beardell, Louis; Wu, Wensi; Kozyak, Benjamin; Sung, Cynthia; Raney, Jordan R. Bio-inspired valveless pumping for Fontan circulation: Experimental and modeling insights (Conference) Biomedical Engineering Society’s (BMES) Annual Meeting, 2025. (BibTeX) @conference{PatelBMES2025, |
 | Holladay, Rachel; Misra, Shivangi; Mitchell, Mason; Panyam, Akshay Ram; Santos, Erica Pauline; Caporale, J. Diego; Liu, Shipeng; Zhang, Yifeng; Ruck, John; Jerolmack, Douglas; Qian, Feifei; Yim, Mark; Sung, Cynthia Characterizing Robot-Ground Interactions for Autonomous Lunar Construction (Conference) International Symposium on Experimental Robotics (ISER), 2025. @conference{holladay2025characterizing,Autonomous construction in lunar environments will require robots to robustly navigate and transport loads across the lunar surface. In this paper, we investigate robot-ground interaction forces unique to LHS-1, a common lunar regolith simulant, to identify feasible motions and forces that the robot can achieve. We conduct three sets of experiments that characterize this force-terrain relationship by pushing and pulling a series of loads over variable terrain and evaluate our ability to actively improve the ground's traversability by applying force. |
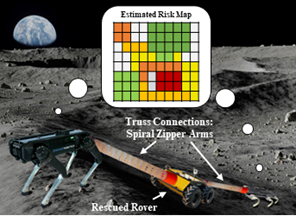
 | Panyam, Akshay Ram; Santos, Erica Pauline; Puentes, Andrik; Yang, Mingguang; Mitchell, Mason; Caporale, Juan Diego; Misra, Shivangi; Holladay, Rachel; Sung, Cynthia; Yim, Mark TRUSSES - A multi-robot collaborative experimental platform (Conference) International Symposium on Experimental Robotics (ISER), 2025. @conference{panyam2025trusses,TRUSSES (Temporarily Robots Unite to Surmount Sandy Entrapment then Separate) is a multi-robot platform developed for the NASA LuSTR program to evaluate and experiment with mobility in lunar regolith. By using a combination of wheeled and legged robots with Spiral Zipper linear actuators to dock and assist each other, this system facilitates experimentation of physical collaboration of robots for improved mobility and resilience in lunar regolith. Experimental results show the ability to perform collaborative slope climbing maneuvers in controlled environments. Based on experimental results, future work will explore more adaptive locomotion control strategies for multi-robot systems in complex sand-like environments. |
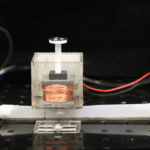
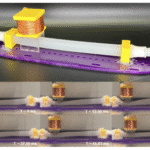 | Unger, Gabriel; Patel, Saheli; Kozyak, Benjamin; Raney, Jordan R.; Sung, Cynthia Liebau Pumping Enables Valveless Soft Swimmer Robot (Conference) International Symposium on Experimental Robotics (ISER), 2025. @conference{Unger2025_Liebau_ISER,Liebau pumping produces net directional flow via periodic compression of a compliant tube at an asymmetric location, eliminat- ing the need for valves or check flaps. While attractive for its simplicity, this mechanism has rarely been explored for robotic propulsion. Here, we present the first free-swimming robot actuated solely by Liebau pump- ing. A soft silicone conduit is cyclically compressed off-center by a sin- gle solenoid actuator, generating traveling pressure waves that produce thrust. Directional control is achieved through simple frequency switch- ing, enabling both forward and reverse swimming. Experimental results reveal distinct frequency bands that correspond to the forward and re- verse swimming modes, with peak velocities of 5.25 cm/s forward at 11 Hz and –1.58 cm/s in reverse at 15 Hz using a 30% duty cycle and 1 A peak current. Agility tests confirm smooth, responsive transitions between di- rections without mechanical valves or moving parts. These results estab- lish Liebau pumping as a viable, low-complexity propulsion method for soft and ecologically safe underwater robots. |
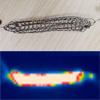
Feshbach, Daniel; Chi, Alex; Huang, Eric; Krieger, Diedra; Sung, Cynthia Artistic Non-Inertial Tracer (ANT): an Educational Kit for a 3-Link Origami Slithering Robot (Conference) 2025 ASEE Annual Conference & Exposition, American Society for Engineering Education 2025. @conference{feshbach2025artistic,The abundance of connections between art and engineering are opportunities to engage artistically inclined students who may not think of themselves as interested in robotics, and to inspire engineering-inclined students to express themselves artistically. This work presents a tool kit and lesson plan for a hands-on introductory robotics activity centering how art and engineering influence each other. The Artistic Non-Inertial Tracer (ANT) is a three-link robot made of origami, which contacts the ground through markers that trace patterns as it slithers around. The design is capable of forward, turning, backward, and diagonal motion. Using origami for the body highlights the influence of art on engineering, and the gait traces are a visually interesting output of the engineering. The kit uses inexpensive components totaling about $26/robot USD (servos, origami, and an Arduino Nano) common in hobbyist communities so that learning how to use these components can empower further exploration of actuated art. Our associated lesson plan engages participants in the assembly and control of ANT and contextualizes it within a broader overview of robot system components and the use of origami in engineering. We successfully ran the lesson as a 3-hour outreach workshop at a local arts organization. | |
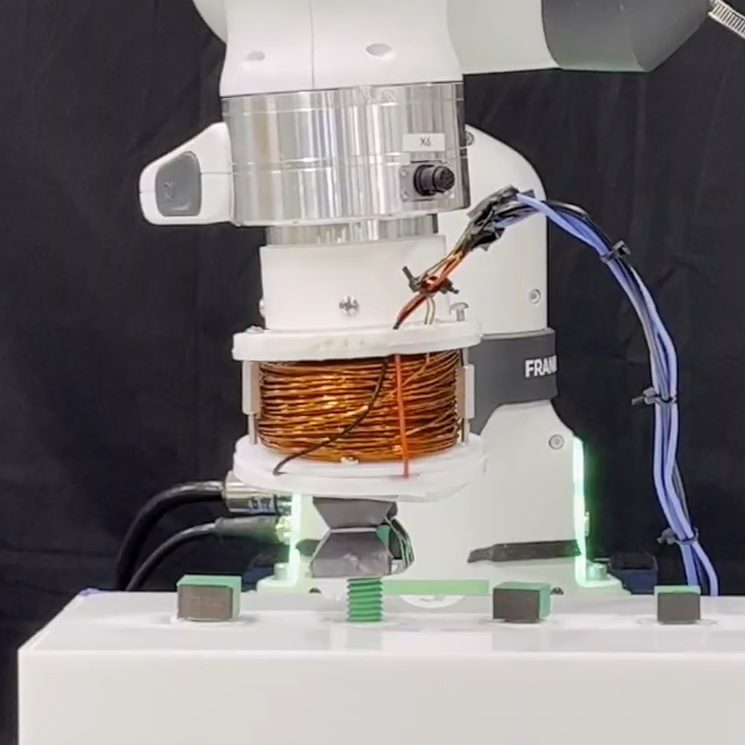 | Unger, Gabriel; Shenoy, Sridhar; Li, Tianyu; Figueroa, Nadia; Sung, Cynthia MORF: Magnetic Origami Reprogramming and Folding System for Repeatably Reconfigurable Structures with Fold Angle Control (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2025. @conference{unger2025morf, We present the Magnetic Origami Reprogramming and Folding System (MORF), a magnetically reprogrammable system capable of precise shape control, repeated transformations, and adaptive functionality for robotic applications. Unlike current self-folding systems, which often lack re-programmability or lose rigidity after folding, MORF generates stiff structures over multiple folding cycles without degradation in performance. The ability to reconfigure and maintain structural stability is crucial for tasks such as reconfigurable tooling. The system utilizes a thermoplastic layer sandwiched within a thin magnetically responsive laminate sheet, enabling structures to self-fold in response to a combination of external magnetic field and heating. We demonstrate that the resulting folded structures can bear loads over 40 times their own weight and can undergo up to 50 cycles of repeated transformations without losing structural integrity. We showcase these strengths in a reconfigurable tool for unscrewing and screwing bolts and screws of various sizes, allowing the tool to adapt its shape to different bolt sizes while withstanding the mechanical stresses involved. This capability highlights the system’s potential for task-varying, load-bearing applications in robotics, where both versatility and durability are essential. |
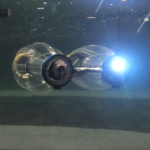
 | Kim, Christopher; Yang, Zhiyuan; Mulay, Neel; Autullo, Kylie; Sung, Cynthia Salp-Inspired Bidirectional Jet Propulsion Swimmer with Self-Sensing (Workshop) IEEE International Conference on Robotics and Automation (ICRA), Workshop: 2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention, 2025. @workshop{kim2025selfsensing,Salps are efficient marine animals that swim via jet propulsion by infilling and expelling water from front and back apertures. Inspired by salps, we recently developed the soft jet-propelled SALP robot, where two SALPs can be physically connected into a two-SALP system for coordinated swimming. This work extends the platform by adding active front and rear valves to the single SALP robot to achieve both bidirectional propulsion and self-sensing using inductance and induced EMF. The valves are able to detect their own open or closed state and the jetting of a neighboring robot. This design will be able to support multi-robot coordination without external sensors or centralized control. |
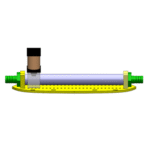 | Unger, Gabriel; Patel, Saheli; Kozyak, Benjamin; Raney, Jordan R.; Sung, Cynthia Bioinspired Valveless Swimming Through Liebau Pumping: A Soft Robotic Propulsion Strategy (Workshop) IEEE International Conference on Robotics and Automation (ICRA), Workshop: 2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention, 2025. @workshop{Unger2025_Liebau_ICRA,Abstract— Liebau pumping describes a valve-free principle of fluid transport in which a compliant tube is rhythmically compressed off-center to generate net flow. Initially recognized in embryonic heart studies, the approach has mostly been investigated in laboratory test rigs but has not been broadly applied for locomotion. This work introduces a fully submersible robot that achieves valveless propulsion using Liebau pumping, offering a quiet, bioinspired alternative to traditional propellers and oscillatory fins. We experimentally characterize how key actuation factors—frequency, duty cycle, waveform, and force amplitude—affect both throughput in a benchtop loop and swimming performance in open water. Bench experiments reveal peak flow rates of approximately 1.2 L/min near 10–15 Hz, while a soft underwater prototype achieves forward motion by operating at 2 Hz and 20% duty cycle. We observe negative net flow at certain mid-range frequencies, highlighting the intricate dynamics of wave reflection and fluid inertia. These findings suggest Liebau pumping can provide noise-minimized, potentially bidirectional propulsion for soft underwater robotics. |
 | Yang, Zhiyuan; Zhang, Yipeng; Herbert, Matthew; Hsieh, M. Ani; Sung, Cynthia Effect of Jet Coordination on Underwater Propulsion with the Multi-Robot SALP System (Conference) IEEE 8th International Conference on Soft Robotics (RoboSoft), Lausanne, Switzerland, pp. 1-8, 2025. @conference{yang2025salp,Salps, marine invertebrates known for their collective swimming through coordinated jet propulsion, offer a unique model for efficient underwater movement. Inspired by this biological system, we develop the SALP (Salp-inspired Approach to Low-energy Propulsion) robot, a soft underwater robot that swims via jet propulsion similarly to a biological salp. The SALPs can be physically connected into SALP chains and coordinate their jets to achieve various propulsion modes. In our experiments, we compare the swimming performance of the individual SALP with the two-SALP system, focusing on power, acceleration, velocity, and energy efficiency. Results indicate that two SALPs swimming synchronously exhibit a 9.0% increase in steady-state velocity and a 16.6% improvement in transient acceleration compared to a single SALP. Additionally, our analysis of swimming efficiency implies that asynchronous swimming is potentially more energy efficient than the synchronous mode, as reflected by a decrease in the cost of transport (COT). |
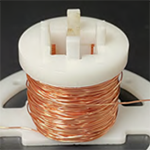 | Kim, Christopher Leveraging Impedance-Related Properties for Free Self-Sensing in Actuators for Compact Robots (PhD Thesis) 2025. @phdthesis{kim2025leveraging,Robotic systems, particularly at small scales, require efficient actuation and sensing solutions that maintain compactness. We are interested in systems where sensing and actuation are seamlessly integrated, specifically using impedance-related properties—such as electrical resistance, induced electromotive force (emf), and inductance— for free self-sensing in actuators without additional sensors. We explore three main example applications: (1) Resistance-based sensing in I-cord knitted shape memory alloy (SMA) actuators enables real-time strain estimation, allowing direct feedback for robotic motion, (2) Induced emf sensing in custom linear solenoid actuators provides contact and velocity feedback, demonstrated in applications such as bistable origami grippers and artificial facial muscle devices for facial reanimation surgery, and (3) Inductance-based sensing further enables position and flow monitoring in active valve systems for bidirectional swimming of underwater swimmer robots, offering a self-contained alternative to external instrumentation. This thesis presents the theoretical foundations, experimental validation, and real-world robotic demonstrations of these sensing approaches. By embedding sensing directly into actuators, this work advances the development of compact and robust robotic systems with potential applications in origami-inspired soft robots, bio-inspired robots, and medical implant devices. |
 | Liu, Shipeng; Caporale, J. Diego; Fulcher, Ethan; Hu, Wilson; Cavallo, Natalie; Zhang, Yifeng; Liao, Xingue; Sung, Cynthia; Qian, Feifei Scout-rover cooperation: Online terrain strength mapping and traversal risk estimation for planetary-analog explorations (Conference) Lunar and Planetary Science Conference (LPSC), 2025. (BibTeX) @conference{liu2025scout, |
2024 |
|
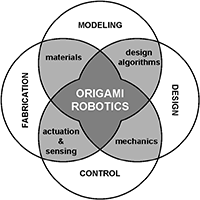 | Sung, Cynthia; Paik, Jamie Origami Robots (Book Chapter) In: Nanayakkara, Thrishantha (Ed.): Handbook on Soft Robotics, Chapter 9, pp. 315-344, Springer Cham, 2024, ISBN: 978-3-031-68619-1. @inbook{sung2024origami,This chapter discusses origami robotics, that is, robots that are fabricated as 2D sheets and folded into their 3D form. Folding is an elegant solution to assembly wherein thin sheets morph to produce a wide variety of structures with complex geometry, kinematics, and mechanical response. By incorporating actuators, sensing, and computation directly into the sheet, full robots can be fabricated, self-assembled, and deployed in a single uniform process. Moving joints are fabricated in exactly the same way as static, structural elements, opening opportunities for end-to-end manufacturing of multi-functional robotic devices with fully embedded behaviors and control. We discuss methods for modeling, designing, controlling, and fabricating origami robots, and we highlight how these principles have been applied in a wide variety of applications, including manipulation, locomotion, self-reconfiguration, and human-robot interaction. |
 | Leung, Brianna; Unger, Gabriel; Escorza, Saúl; Chen, Jonathan; Fogel, Mark; Sung, Cynthia Mechanical Characterization of an Origami-Inspired Multistable Tube for Reconfigurable Implants, (Conference) Biomedical Engineering Society’s (BMES) Annual Meeting, 2024. (BibTeX) @conference{LeungBMES, |
 | Feshbach, Daniel; Chen, Wei-Hsi; Xu, Ling; Schaumburg, Emil; Huang, Isabella; Sung, Cynthia Algorithmic Design of Kinematic Trees Based on CSC Dubins Planning for Link Shapes (Conference) Workshop on the Algorithmic Foundations of Robotics (WAFR), 2024. @conference{feshbach2024kinematicTrees,Computational tools for robot design require algorithms moving between several layers of abstraction including task, morphology, kinematics, mechanism shapes, and actuation. In this paper we give a linear-time algorithm mapping from kinematics to mechanism shape for tree-structured linkages. Specifically, we take as input a tree whose nodes are axes of motion (lines which joints rotate about or translate along) along with types and sizes for joints on these axes, and a radius $r$ for a tubular bound on the link shapes. Our algorithm outputs the geometry for a kinematic tree instantiating these specifications such that the neutral configuration has no self-intersection. The algorithm approach is based on understanding the mechanism design problem as a planning problem for link shapes, and arranging the joints along their axes of motion to be appropriately spaced and oriented such that feasible, non-intersecting paths exist linking them. Since link bending is restricted by its tubular radius, this is a Dubins planning problem, and to prove the correctness of our algorithm we also prove a theorem about Dubins paths: if two point-direction pairs are separated by a plane at least $2r$ from each, and the directions each have non-negative dot product with the plane normal, then they are connected by a radius-$r$ CSC Dubins path with turn angles $leq pi$. We implement our design algorithm in code and provide a 3D printed example of a tubular kinematic tree. The results provide an existence proof of tubular-shaped kinematic trees implementing given axes of motion, and could be used as a starting point for further optimization in an automated or algorithm-assisted robot design system. |
 | Xu, Ling; Baryshnikov, Yuliy; Sung, Cynthia Reparametrization of 3D CSC Dubins' Paths Enabling 2D Search (Conference) Workshop on the Algorithmic Foundations of Robotics (WAFR), 2024. @conference{xu2024cscDubinsReparameterization,This paper addresses the Dubins path planning problem for vehicles in 3D space. In particular, we consider the problem of computing CSC paths– paths that consist of a circular arc (C) followed by a straight segment (S) followed by a circular arc (C). These paths are useful for vehicles such as fixed-wing aircraft and underwater submersibles that are subject to lower bounds on turn radius. We present a new parameterization that reduces the 3D CSC planning problem to a search over 2 variables, thus lowering search complexity, while also providing gradients that assist that search. We use these equations with a numerical solver to explore numbers and types of solutions computed for a variety of planar and 3D scenarios. Our method successfully computes CSC paths for the large majority of test cases, indicating that it could be useful for future generation of robust, efficient curvature-constrained trajectories. |
 | Unger, Gabriel; Sung, Cynthia Re-programmable Matter by Folding: Magnetically Controlled Origami that Self-Folds, Self-Unfolds, and Self-Reconfigures On-Demand (Conference) 8th International Meeting on Origami in Science, Mathematics, and Education, 2024. @conference{unger2024RMBF,We present a reprogrammable matter system that changes shape in a controllable manner in real-time and on-demand. The system uses origami-inspired fabrication for self-assembly and repeated self-reconfiguration. By writing a magnetic program onto a thin laminate and applying an external magnetic field, we control the sheet to self-fold. The magnetic program can be written at millimeter resolution over hundreds of programming cycles and folding steps. We demonstrate how the same sheet can fold and unfold into multiple shapes using a fully automated program-and-fold process. Finally, we demonstrate how electronic components can be incorporated to produce functional structures such as a foldable display. The system has advantages over existing programmable matter systems in its versatility and ability to support potentially any folding sequence. |
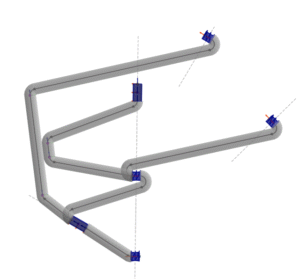
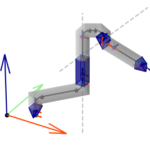 | Feshbach, Daniel; Chen, Wei-Hsi; Koditschek, Daniel E.; Sung, Cynthia Kinegami: Open-source Software for Creating Kinematic Chains from Tubular Origami (Conference) 8th International Meeting on Origami in Science, Mathematics, and Education (8OSME), 2024. @conference{feshbach2024kinegamiPython,Arms, legs, and fingers of animals and robots are all examples of “kinematic chains" - mechanisms with sequences of joints connected by effectively rigid links. Lightweight kinematic chains can be manufactured quickly and cheaply by folding tubes. In recent work [Chen et al. 2022], we demonstrated that origami patterns for kinematic chains with arbitrary numbers of degrees of freedom can be constructed algorithmically from a minimal kinematic specification (axes that joints rotate about or translate along). The work was founded on a catalog of tubular crease patterns for revolute joints (rotation about an axis), prismatic joints (translation along an axis), and links, which compose to form the specified design. With this paper, we release an open-source python implementation of these patterns and algorithms. Users can specify kinematic chains as a sequence of degrees of freedom or by specific joint locations and orientations. Our software uses this information to construct a single crease pattern for the corresponding chain. The software also includes functions to move or delete joints in an existing chain and regenerate the connecting links, and a visualization tool so users can check that the chain can achieve their desired configurations. This paper provides a detailed guide to the code and its usage, including an explanation of our proposed representation for tubular crease patterns. We include a number of examples to illustrate the software’s capabilities and its potential for robot and mechanism design. |
 | Weakly, Jessica Bistable Structures Enable Passive Transitions in Mobile Robots (PhD Thesis) 2024. @phdthesis{weakly2024bistable,Making robots more capable, agile, and efficient will require careful design of the robot’s mechanical body to match task requirements. Passive components allow a robot to perform a task without a dedicated actuator, often improving both power consumption and overall performance. In this thesis, we investigate robotic applications of bistable mechanisms, mechanical structures that exhibit two stable static equilibria, to enable passive actuation and locking for systems with discrete task modes. More specifically, the main theoretical contribution of this thesis is a method for determining theactuation force requirements for dynamically-actuated bistable mechanisms, where inertial forces are responsible for producing snap-through. In this case, there is a direct relationship between the inertial forces and the output force of the actuators that produce the associated motions. We find that the minimum actuating force required for snap-through depends on the ratio between the mass on the bistable structure and the robot’s total mass, and that it also depends on friction but not on viscous damping. The main experimental contribution includes demonstrations of the impact of bistable mechanisms on grasping and flying systems. For perching, we show that attaching a linkage to a passive bistable structure augments a gripper’s locking strength, leading to passive grasping with a high strength-to-weight ratio. For aerial reconfiguration, we demonstrate that the energy cost of passive dynamic transformation can be offset by the efficiency gains of transforming from a quadrotor to a fixed wing mode. Overall, this thesis shows that passive bistable mechanisms can eliminate the need for task-specific actuators by repurposing existing locomotion actuators. |
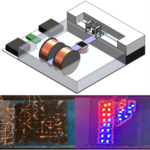
 | Weakly, Jessica; Ho, Sarah; Feehery, Erica; Kothmann, Bruce; Sung, Cynthia A low-cost, adaptable system for lift and drag measurement in an educational wind tunnel (Conference) 2024 ASEE Annual Conference and Exposition, 2024. @conference{weakly2024windtunnel,Wind tunnel testing augments the undergraduate fluid dynamics curriculum by providing hands-on application of the course material, and a low-cost version of a force balance is desirable. To maximize the utility of wind tunnel-based lessons and laboratory demonstrations, there is also a need for a setup that is easily adaptable to different tests and loading applications. This paper provides such a force balance design, along with detailed evaluation and benchmarking to characterize the accuracy of the force balance. Our force balance uses readily available materials having a total cost under $125. Static load tests show that the force balance is accurate with a mean absolute percentage error of only 2.5%. We demonstrate the system’s usefulness and adaptability with classic examples of measuring drag on a sphere and characterizing a NACA 0012 wing, as well as with measuring lift on a foldable wing. Finally, we pilot the force balance in an undergraduate mechanical engineering lab setting and find that students are able to explore the setup, understand the load cell functionality, and use the system to measure drag on a sphere. The force balance enables students to gain hands-on learning experience related to both fluid mechanics and statics, and our user study shows that the force balance is durable through classroom use. The low cost, robustness, and high adaptability of the system makes it suitable for incorporating in multiple labs or for allowing student project teams to utilize the system in their own experiments. |
 | Chen, Wei-Hsi; Caporale, J. Diego; Koditschek, Daniel E.; Sung, Cynthia Robogami Reveals the Utility of Slot-Hopper for Co-Design of DOQ’s Body and Behavior (Workshop) ICRA 2024 Workshop on Co-design in Robotics: Theory, Practice, and Challenges, 2024. (BibTeX | Links: ) @workshop{chen2024robogami, |
 | Weakly, Jessica; Li, Xuan; Agarwal, Tejas; Li, Minchen; Folk, Spencer; Jiang, Chenfanfu; Sung, Cynthia Bistable Aerial Transformer: A Quadrotor Fixed-Wing Hybrid That Morphs Dynamically Via Passive Soft Mechanism (Journal Article) In: ASME Journal of Mechanisms and Robotics, vol. 16, iss. 7, no. JMR-23-1641, pp. 071016, 2024. @article{weakly2024BATb,Aerial vehicle missions require navigating trade-offs during design, such as the range, speed, maneuverability, and size. Multi-modal aerial vehicles enable this trade-off to be negotiated during flight. This paper presents a Bistable Aerial Transformer (BAT) robot, a novel morphing hybrid aerial vehicle that switches between quadrotor and fixed-wing modes via rapid acceleration and without any additional actuation beyond those required for normal flight. The design features a compliant bistable mechanism made of thermoplastic polyurethane (TPU) that bears a large mass at the center of the robot’s body. When accelerating, inertial forces transition the vehicle between its stable modes, and a fourbar linkage connected to the bistable mechanism folds the vehicle’s wings in and out. The paper includes the full robot design and a comparison of the fabricated system to the elastodynamic simulation. Successful transitions between the two modes in mid-flight, as well as sustained flight in each mode indicate that the vehicle experiences higher agility in the quadrotor mode and higher flight efficiency in the fixed-wing mode, at an energy equivalent cost of only 2 s of flight time per pair of transitions. The vehicle demonstrates how compliant and bistable mechanisms can be integrated into future aerial vehicles for controllable self-reconfiguration for tasks such as surveillance and sampling that require a combination of maneuverability and long-distance flight. |
 | Jerolmack, Douglas; Koditschek, Daniel; Qian, Feifei; Yim, Mark; Sung, Cynthia TRUSSES: Temporarily, Robots Unite to Surmount Sandy Entrapments, then Separate (Conference) Lunar Surface Innovation Consortium Spring Meeting, 2024. (BibTeX) @conference{sung2024trusses, |
 | Misra, Shivangi; Sung, Cynthia Online Optimization of Soft Manipulator Mechanics via Hierarchical Control (Conference) 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft), 2024. @conference{misra2024tsmb,Actively tuning mechanical properties in soft robots is now feasible due to advancements in soft actuation technologies. In soft manipulators, these novel actuators can be distributed over the robot body to allow greater control over its large number of degrees of freedom and to stabilize local deformations against a range of disturbances. In this paper, we present a hierarchical policy for stiffness control for such a class of soft manipulators. The stiffness changes induce desired deformations in each segment, thereby influencing the manipulator’s end-effector position. The algorithm can be run as an online controller to influence the manipulator’s stable states – as we demonstrate in simulation – or offline as a design algorithm to optimize stiffness distributions – as we showcase in a hardware demonstration. Our proposed hierarchical control scheme is agnostic to the stiffness actuation method and can extend to other soft manipulators with nonuniform stiffness distributions. |
 | Yang, Zhiyuan; Sung, Cynthia Bio-Inspired Approach to Energetically Efficient Jet Propulsion (Workshop) 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft), Workshop: Soft Robotics Inspired Biology, 2024. (BibTeX | Links: ) @workshop{yang2024swimmer, |
 | Chen, Wei-Hsi; Qi, Xueyang; Feshbach, Daniel; Wang, Stanley J.; Kuang, Duyi; Full, Robert; Koditschek, Daniel; Sung, Cynthia Bio-inspired quadrupedal robot with passive paws through algorithmic origami design (Workshop) 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft) Workshop: Soft Robotics Inspired Biology, 2024. (BibTeX | Links: ) @workshop{chen2024bio, |
 | Kim, Christopher; Yang, Lele; Anbuchelvan, Ashwath; Garg, Raghav; Milbar, Niv; Vitale, Flavia; Sung, Cynthia Origami-Inspired Bistable Gripper with Self-Sensing Capabilities (Conference) IEEE-RAS International Conference on Soft Robotics (Robosoft), 2024. @conference{kim2024origami,An origami-inspired bistable gripper, featuring a dual-function custom PET linear solenoid actuator that acts both as an actuator and a sensor, is presented. Movements in the permanent magnet plunger, which is directly mounted to the gripper, create induced electromotive force (emf) in the solenoid, and these induced emf measurements are used to detect snap-through actions and light contacts on the gripper. The fabrication methods for the gripper, actuator, and a gel-free soft wearable EMG electrode are outlined, and the actuator’s self-sensing method utilizing the time-integral of the induced emf measurements are explored. Because a self-sensing actuator eliminates the need for extra sensors, it allows for further miniaturization of the robot while maintaining its compactness and lightweight design. The paper also introduces a full human-in-the-loop system, allowing users to open or close the gripper with their biceps via a wearable EMG electrode. This system bridges human intent with robotic action, offering a more intuitive interaction model for robotic control. |
 | Chen, Rongqian; Kwon, Jun; Chen, Wei-Hsi; Sung, Cynthia Design and Characterization of a Pneumatic Tunable-Stiffness Bellows Actuator (Conference) IEEE-RAS International Conference on Soft Robotics (RoboSoft), 2024. @conference{chen2024design,We introduce a self-contained pneumatic actuator capable of 1.43 times stiffness gain from 1332 N/m to 1913 N/m without needing an external air source or valve. The design incorporates an air chamber bellows and a spring bellows, connected and sealed. Stiffness modulation is achieved by altering the air chamber volume. We present an approach for computing the volume, pressurized force, and stiffness of a single bellows component, as well as methods for composing single bellows models to predict the change in stiffness of the dual bellows actuator as a function of air chamber compression. We detail the fabrication of the actuator and verify the models on the fabricated prototype. This actuator holds promise for future integration in tunable stiffness robots demanding high strength and adaptability in dynamic scenarios. |
2023 |
|
 | Feshbach, Daniel; Wu, Xuelin; Vasireddy, Satviki; Beardell, Louis; To, Bao; Baryshnikov, Yuliy; Sung, Cynthia CurveQuad: A centimeter-scale origami quadruped that leverages curved creases to self-fold and crawl with one motor (Conference) IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023. @conference{feshbach2023curvequad,We present CurveQuad, a miniature curved origami quadruped that is able to self-fold and unfold, crawl, and steer, all using a single actuator. CurveQuad is designed for planar manufacturing, with parts that attach and stack sequentially on a flat body. The design uses 4 curved creases pulled by 2 pairs of tendons from opposite ends of a link on a 270deg servo. It is 8 cm in the longest direction and weighs 10.9 g. Rotating the horn pulls the tendons inwards to induce folding. Continuing to rotate the horn shears the robot, enabling the robot to shuffle forward while turning in either direction. We experimentally validate the robot’s ability to fold, steer, and unfold by changing the magnitude of horn rotation. We also demonstrate basic feedback control by steering towards a light source from a variety of starting positions and orientations, and swarm aggregation by having 4 robots simultaneously steer towards the light. The results demonstrate the potential of using curved crease origami in self-assembling and deployable robots with complex motions such as locomotion. |
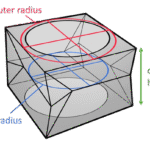
 | Chen, Guanyu; Chen, Dongsheng; Weakly, Jessica; Sung, Cynthia Drag coefficient characterization of the origami magic ball (Proceedings Article) In: ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), pp. DETC2023-117182, 2023. @inproceedings{chen2023drag,The drag coefficient plays a vital role in the design and optimization of robots that move through fluids. From aircraft to underwater vehicles, their geometries are specially engineered so that the drag coefficients are as low as possible to achieve energy-efficient performances. Origami magic balls are 3-dimensional reconfigurable geometries composed of repeated simple waterbomb units. Their volumes can change as their geometries vary and we have used this concept in a recent underwater robot design. This paper characterizes the drag coefficient of an origami magic ball in a wind tunnel. Through dimensional analysis, the scenario where the robot swims underwater is equivalently transferred to the situation when it is in the wind tunnel. With experiments, we have collected and analyzed the drag force data. It is concluded that the drag coefficient of the magic ball increases from around 0.64 to 1.26 as it transforms from a slim ellipsoidal shape to an oblate spherical shape. Additionally, three different magic balls produce increases in the drag coefficient of between 57% and 86% on average compared to the smooth geometries of the same size and aspect ratio. The results will be useful in future designs of robots using waterbomb origami in fluidic environments. |
 | Chen, Dongsheng; Huang, Zonghao; Sung, Cynthia Electronics Design and Verification for Robots With Actuation and Sensing Requirements (Conference) ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), 2023. @conference{chen2023electronics,Robot design is a challenging problem involving a balance between the robot's mechanical design, kinematic structure, and actuation and sensing capabilities. Recent work in computational robot design has focused on mechanical design while assuming that the given actuators are sufficient for the task. At the same time, existing electronics design tools ignore the physical requirements of the actuators and sensors in the circuit. In this paper, we present the first system that closes the loop between the two, incorporating a robot's mechanical requirements into its circuit design process. We show that the problem can be solved using an iterative search consisting of two parts. First, a dynamic simulator converts the mechanical design and the given task into concrete actuation and sensing requirements. Second, a circuit generator executes a branch-and-bound search to convert the design requirements into a feasible electronic design. The system iterates through both of these steps, a process that is sometimes required since the electronics components add mass that may affect the robot's design requirements. We demonstrate this approach on two examples -- a manipulator and a quadruped -- showing in both cases that the system is able to generate a valid electronics design. |
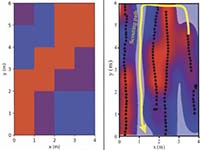
 | Wilson, Cristina; Brown, Kallahan; Sung, Cynthia The Impact of Robotics Expertise on Iterative Robot Design Decisions and Vulnerability to Anchoring Bias (Conference) ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), 2023. @conference{wilson2023impact,Robot design is a complex cognitive activity that requires the designer to iteratively navigate multiple engineering disciplines and the relations between them. In this paper, we explore how people approach robot design and how trends in design strategy vary with the level of expertise of the designer. Using our interactive Build-a-Bot software tool, we recruited 39 participants from the 2022 IEEE International Conference on Robotics and Automation. These participants varied in age from 19 to 56 years, and had between 0 and 17 years of robotics experience. We tracked the participants' design decisions over the course of a 15~min. task of designing a ground robot to cross an uneven environment. Our results showed that participants engaged in iterative testing and modification of their designs, but unlike previous studies, there was no statistically significant effect of participant's expertise on the frequency of iterations. We additionally found that, across levels of expertise, participants were vulnerable to anchoring-and-adjustment, in which they latched onto an initial design concept and insufficiently adjusted the design, even when confronted with difficulties developing the concept into a satisfactory solution. The results raise interesting questions for how future engineers can avoid design bias and how design tools can assist in both efficient assessment and optimization of design workflow for complex design tasks. |
 | Misra, Shivangi; Mitchell, Mason; Chen, Rongqian; Sung, Cynthia Design and Control of a Tunable-Stiffness Coiled-Spring Actuator (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2023. @conference{misra2023design,We propose a novel design for a lightweight and compact tunable stiffness actuator capable of stiffness changes up to 20x. The design is based on the concept of a coiled spring, where changes in the number of layers in the spring change the bulk stiffness in a near-linear fashion. We present an elastica nested rings model for the deformation of the proposed actuator and empirically verify that the designed stiffness-changing spring abides by this model. Using the resulting model, we design a physical prototype of the tunable-stiffness coiled spring actuator and discuss the effect of design choices on the resulting achievable stiffness range and resolution. In the future, this actuator design could be useful in a wide variety of soft robotics applications, where fast, controllable, and local stiffness change is required over a large range of stiffnesses. |
 | Chen, Wei-Hsi; Rozen-Levy, Shane; Addison, Griffin; Peach, Lucien; Koditschek, Daniel E.; Sung, Cynthia R. DOQ: A Dynamic Origami Quadrupedal Robot (Workshop) ICRA Workshop on Origami-based Structures for Designing Soft Robots with New Capabilities, 2023. (BibTeX) @workshop{chen2023DOQ, |
 | Chen, Wei-Hsi; Yang, Woohyeok; Peach, Lucien; Koditschek, Daniel E.; Sung, Cynthia R. Kinegami: Algorithmic Design of Compliant Kinematic Chains From Tubular Origami (Journal Article) In: IEEE Transactions on Robotics, vol. 39, iss. 2, pp. 1260-1280, 2023, (Honorable mention for 2023 IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award). @article{chen2022kinegami,Origami processes can generate both rigid and compliant structures from the same homogeneous sheet material. In this article, we advance the origami robotics literature by showing that it is possible to construct an arbitrary rigid kinematic chain with prescribed joint compliance from a single tubular sheet. Our “Kinegami” algorithm converts a Denavit–Hartenberg specification into a single-sheet crease pattern for an equivalent serial robot mechanism by composing origami modules from a catalogue. The algorithm arises from the key observation that tubular origami linkage design reduces to a Dubins path planning problem. The automatically generated structural connections and movable joints that realize the specified design can also be endowed with independent user-specified compliance. We apply the Kinegami algorithm to a number of common robot mechanisms and hand-fold their algorithmically generated single-sheet crease patterns into functioning kinematic chains. We believe this is the first completely automated end-to-end system for converting an abstract manipulator specification into a physically realizable origami design that requires no additional human input. |
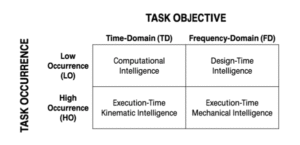 | Carter, Aja; Chen, Wei-Hsi; Misra, Shivangi; Sung, Cynthia A task-to-intelligence mapping: When is embodied intelligence worth designing? (Conference) Embodied Intelligence Conference (EI-2022), 2023. @conference{carter2023task,While there has been much work in the space of embodied intelligence, we as a field have struggled to define what exactly embodied intelligence is and how it should be used. In this paper, we propose that there are multiple types of embodied intelligence, and that these different types of embodied intelligence are suited to different types of tasks. We introduce a method for classifying tasks according to their objective and occurrence, and we describe how existing work in embodied intelligence fits into this framework. We hope that this proposed framework will initiate a discussion to more formally think about the role that embodied intelligence plays and the value that it brings to engineering and robotics. |
2022 |
|
 | Huang, Zonghao; Wu, Quinn; Howard, David; Sung, Cynthia EvoRobogami: Co-designing with Humans in Evolutionary Robotics Experiments (Conference) Genetic and Evolutionary Computation Conference (GECCO), 2022. @conference{huang2022evorobogami,We study the effects of injecting human-generated designs into the initial population of an evolutionary robotics experiment, where subsequent population of robots are optimised via a Genetic Algorithm and MAP-Elites. First, human participants interact via a graphical front-end to explore a directly-parameterised legged robot design space and attempt to produce robots via a combination of intuition and trial-and-error that perform well in a range of environments. Environments are generated whose corresponding high-performance robot designs range from intuitive to complex and hard to grasp. Once the human designs have been collected, their impact on the evolutionary process is assessed by replacing a varying number of designs in the initial population with human designs and subsequently running the evolutionary algorithm. Our results suggest that a balance of random and hand-designed initial solutions provides the best performance for the problems considered, and that human designs are most valuable when the problem is intuitive. The influence of human design in an evolutionary algorithm is a highly understudied area, and the insights in this paper may be valuable to the area of AI-based design more generally. |
 | Liu, Addison; Johnson, Mykell; Sung, Cynthia Increasing Reliability of Self-Folding of the Origami Hypar (Journal Article) In: ASME Journal of Mechanisms and Robotics, vol. 14, no. 6, pp. 061003, 2022. @article{liu2022increasing,Self-folding systems, which can transform autonomously from a flat sheet into a 3D machine, provide opportunities for rapidly fabricable robots that are deployable on-demand. Existing self-folding fabrication processes convert fold patterns into laminated structures that respond to external stimuli, most commonly heat. However, demonstrations of these approaches have been generally limited to simple fold patterns with little ambiguity in folding configuration, and the reliability of self-folding drops drastically with the fold pattern complexity. In this paper, we explore methods of biasing a symmetric fold pattern, the origami hyperbolic paraboloid (hypar), to fold into one of two possible configurations. The biasing methods are simulated using a bar-and-hinge inspired self-folding model that defines a single fold as a bending beam and the hypar crease pattern as an elastic spring network. Simulation results are also verified on physical samples. Based on these results, three techniques to bias the hypar by manipulating the target fold angles are proposed and tested. The results show that biasing a self-folding pattern can increase folding accuracy from 50% (purely random) to 70%, and provide insights for improving the reliability of future self-folding systems with complex fold patterns. |
 | Misra, Shivangi; Sung, Cynthia Forward kinematics and control of a segmented tunable-stiffness 3-D continuum manipulator (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2022. @conference{misra2022forward,In this work, we consider the problem of controlling the end effector position of a continuum manipulator through local stiffness changes. Continuum manipulators offer the advantage of continuous deformation along their lengths, and recent advances in smart material actuators further enable local compliance changes, which can affect the manipulator's bulk motion. However, leveraging local stiffness change to control motion remains lightly explored. We build a kinematic model of a continuum manipulator as a sequence of segments consisting of symmetrically arranged springs around the perimeter of every segment, and we show that this system has a closed form solution to its forward kinematics. The model includes common constraints such as restriction of torsional or shearing movement. Based on this model, we propose a controller on the spring stiffnesses for a single segment and provide provable guarantees on convergence to a desired goal position. The results are verified in simulation and compared to physical hardware. |
 | Sun*, Yuchen; Wang*, Joanna; Sung, Cynthia Repeated jumping with the REBOund: Self-righting jumping robot leveraging bistable origami-inspired design (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2022, (* = co-first author). @conference{sun2022repeated,Repeated jumping is crucial to the mobility of jumping robots. In this paper, we extend upon the REBOund jumping robot design, an origami-inspired jumping robot that uses the Reconfigurable Expanding Bistable Origami (REBO) pattern as its body. The robot design takes advantage of the pattern's bistability to jump with controllable timing. For jump repeatedly, we also add self-righting legs that utilize a single motor actuation mechanism. We describe a dynamic model that captures the compression of the REBO pattern and the REBOund self-righting process and compared it to the physical robot. Our experiments show that the REBOund is able to successfully self-right and jump repeatedly over tens of jumps. |
 | Qin*, Yuhong; Ting*, Linda; Saven*, Celestina; Amemiya, Yumika; Tanis, Michael; Kamien, Randall; Sung, Cynthia TrussBot: Modeling, design and control of a compliant, helical truss of tetrahedral modules (Conference) IEEE International Conference on Robotics and Automation, 2022, (*=co-first author). @conference{qin2022trussbot,Modular and truss robots offer the potential of high reconfigurability and great functional flexibility, but common implementations relying on rigid components often lead to highly complex actuation and control requirements. This paper introduces a new type of modular, compliant robot: TrussBot. TrussBot is composed of 3D-printed tetrahedral modules connected at the corners with compliant joints. We propose a truss geometry, analyze its deformation modes, and provide a simulation framework for predicting its behavior under applied loads and actuation. The TrussBot is geometrically constrained, thus requiring compliant joints to move. The TrussBot can be actuated through a network of tendons which pinch vertices together and apply a twisting motion due to the structure's connectivity. The truss was demonstrated in a physical prototype and compared to simulation results. |
 | Misra, Shivangi; Sung, Cynthia Control of a segmented tunable-stiffness 3-D continuum manipulator (Workshop) ICRA Workshop on Compliant Robot Manipulation: Challenges and New Opportunities, 2022. (BibTeX) @workshop{misra2022control, |
2021 |
|
 | Lee, Young-Joo; Misra, Shivangi; Chen, Wei-Hsi; Koditschek, Daniel E.; Sung, Cynthia; Yang, Shu Tendon-Driven Auxetic Tubular Springs for Resilient Hopping Robots (Journal Article) In: Advanced Intelligent Systems, vol. 4, pp. 2100152, 2021. @article{lee2021tendon,Compliance in jumping robots improves gait stability and enables energy-efficient locomotion. Here, 3D printable auxetic tubular springs from thermoplastic polyurethane (TPU) for rapid and sustainable hopping are developed. Because the springs have negative Poisson's ratios, they become stiffer as compression proceeds and theoretically stores 35.2% more energy than a linear spring with the same stiffness. As the stress concentrates on the hinges, it is revealed through experimental, numerical, and analytical investigations that hinge geometries, for example, the lattice angle and hinge radius, governs the global stiffness and robustness of the springs. The hopping robot leg composed of three auxetic tubular springs in parallel sustains more than 1,000 cycles of repeated, one-degree-of-freedom (1-DOF) vertical hopping and two-degree-of-freedom (2-DOF) forward hopping. The 2.5 kg-robot system requires minimum 420 mJ of elastic energy for repeated hopping. The springs are pre-compressed by tendon-driven actuators and stores 1.08 J during jumping and release the springs when touching the ground. The power stroke is calculated as 15–18 W. The average velocity of the hopping robot reaches 0.06 m s−1 with the increase of touchdown angle to 0.125 rad. The cost of transport is calculated as 6.7, similar to those of the living organisms. |
 | Yuan, Yifan; Sung, Cynthia Programmable Stiffness and Applications of 3D Printed TPU Diamond Lattices (Conference) International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, no. DETC2021-69826, V08AT08A016, 2021. @conference{yuan2021programmable,Additive manufacturing provides a rapid manufacturing method for a variety of materials with different applications. Thermoplastic Polyurethane (TPU) is a soft polymer material that can be 3D printed. In this work, we explore the mechanical properties of a 3D printed grid pattern structure with TPU. By changing the pattern's cell size and wall thickness parameters, we control the density of the grid lattice and, as a result, the bulk elastic modulus of the structure. We compare simulation and physical compression tests and conclude that the bulk elastic modulus of a print is related to the infill percentage according to a cubic relationship, with higher infill percentage samples resulting in higher elastic moduli. The precise cell size and wall thickness parameter values are minor influences comparatively. The elastic moduli of the resulting samples span from 0.36 MPa with 23.44% infill to 21.83 MPa with 75% infill, compared to an elastic modulus of 64.31 MPa when printing at 100% density. We also explore other factors such as the sample size, the printer, the build orientation, and the sample geometry. The results have uses in a variety of applications, including a custom linear spring, a bistable gripper, or a soft robot finger. |
 | Yang, Zhiyuan; Chen, Dongsheng; Levine, David J.; Sung, Cynthia Origami-inspired robot that swims via jet propulsion (Journal Article) In: IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7145-7152, 2021. @article{yang2021origami,Underwater swimmers present unique opportunities for using bodily reconfiguration for self propulsion. Origami-inspired designs are low-cost, fast to fabricate, robust, and can be used to create compliant mechanisms useful in energy efficient underwater locomotion. In this paper, we demonstrate an origami-inspired robot that can change its body shape to ingest and expel water, creating a jet that propels it forward similarly to cephalopods. We use the magic ball origami pattern, which can transform between ellipsoidal (low volume) and spherical (high volume) shapes. A custom actuation mechanism contracts the robot to take in fluid, and the inherent mechanics of the magic ball returns the robot to its natural shape upon release. We describe the design and control of this robot and verify its locomotion in a water tank. The resulting robot is able to move forward at 6.7 cm/s (0.2 body lengths/s), with a cost of transport of 2.0. |
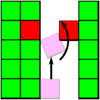 | Feshbach, Daniel; Sung, Cynthia Reconfiguring Non-Convex Holes in Pivoting Modular Cube Robots (Journal Article) In: IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 6701-6708, 2021. @article{feshbach2021reconfiguring,We present an algorithm for self-reconfiguration of admissible 3D configurations of pivoting modular cube robots with holes of arbitrary shape and number. Cube modules move across the surface of configurations by pivoting about shared edges, enabling configurations to reshape themselves. Previous work provides a reconfiguration algorithm for admissible 3D configurations containing no non-convex holes; we improve upon this by handling arbitrary admissible 3D configurations. The key insight specifies a point in the deconstruction of layers enclosing non-convex holes at which we can pause and move inner modules out of the hole. We prove this happens early enough to maintain connectivity, but late enough to open enough room in the enclosing layer for modules to escape the hole. Our algorithm gives reconfiguration plans with O(n^2) moves for n modules. |
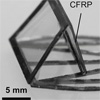 | Cha, Wujoon; Kaspar, Luke; Campbell, Matthew F.; Calenza, Thomas J.; Popov, George A.; Wang, Jeremy; Sung, Cynthia R.; Yim, Mark; Bargatin, Igor Carbon fiber–aluminum sandwich for micro-aerial vehicles and miniature robots (Journal Article) In: MRS Advances, vol. 6, pp. 477–481, 2021. @article{cha2021carbon,We present carbon-fiber and aluminum sandwich plates with millimeter thicknesses that exhibit high stiffness- and strength-to-weight ratios. These composites consist of carbon-fiber-reinforced polymer faces and waterjet-cut aluminum cores, bonded using epoxy. Relative to single-ply carbon-fiber-reinforced polymer sheets, this construction provides 22-fold increases in mass-specific flexural rigidity and 18-fold increases in mass-specific flexural strength, with areal densities of only 120–260 mg/cm2. Our work represents a simple and inexpensive platform for creating extremely lightweight structural components for microflyers and small robots. |
 | Li*, Xuan; McWilliams*, Jessica; Li, Minchen; Sung, Cynthia; Jiang, Chenfanfu Soft hybrid aerial vehicle via bistable mechanism (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2021, (*=co-first author, best paper in mechanisms and design). @conference{li2021hav,Unmanned aerial vehicles have been demonstrated successfully in a variety of tasks, including surveying and sampling tasks over large areas. These vehicles can take many forms. Quadrotors' agility and ability to hover makes them well suited for navigating potentially tight spaces, while fixed wing aircraft are capable of efficient flight over long distances. Hybrid aerial vehicles (HAVs) attempt to achieve both of these benefits by exhibiting multiple modes; however, morphing HAVs typically require extra actuators which add mass, reducing both agility and efficiency. We propose a morphing HAV with folding wings that exhibits both a quadrotor and a fixed wing mode without requiring any extra actuation. This is achieved by leveraging the motion of a bistable mechanism at the center of the aircraft to drive folding of the wing using only the existing motors and the inertia of the system. We optimize both the bistable mechanism and the folding wing using a topology optimization approach. The resulting mechanisms were fabricated on a 3D printer and replaced the frame of an existing quadrotor. Our prototype successfully transitions between both modes and our experiments demonstrate that the behavior of the fabricated prototype is consistent with that of the simulation. |
 | McWilliams, Jessica; Yuan, Yifan; Friedman, Jason; Sung, Cynthia Push On, Push Off: A compliant bistable gripper with mechanical sensing and actuation (Conference) IEEE International Conference on Soft Robotics (RoboSoft), 2021. @conference{mcwilliams2021push,Grasping is an essential task in robotic applications and is an open challenge due to the complexity and uncertainty of contact interactions. In order to achieve robust grasping, systems typically rely on precise actuators and reliable sensing in order to control the contact state. We propose an alternative design paradigm that leverages contact and a compliant bistable mechanism in order to achieve "sensing" and "actuation" purely mechanically. To grasp an object, the manipulator holding our end effector presses the bistable mechanism into the object until snap-through causes the gripper to enclose it. To release the object, the tips of the gripper are pushed against the ground, until rotation of the linkages causes snap-through in the other direction. This push-on push-off scheme reduces the complexity of the grasping task by allowing the manipulator to automatically achieve the correct grasping behavior as long as it can get the end effector to the correct location and apply sufficient force. We present our dynamic model for the bistable gripping mechanism, propose an optimized result, and demonstrate the functionality of the concept on a fabricated prototype. We discuss our stiffness tuning strategy for the 3D printed springs, and verify the snap-through behavior of the system using compression tests on an MTS machine. |
 | Kim, Christopher; Chien, Athena; Tippur, Megha; Sung, Cynthia Fabrication and characterization of I-cord knitted SMA actuators (Conference) IEEE International Conference on Soft Robotics (RoboSoft), 2021. @conference{kim2021sma,Knitted SMA actuators provide greater actuation stroke than single-strand SMA wire actuators by leveraging its knitted structure. However, due to short-circuiting through interlacing knit loops, existing knitted SMA sheet actuators are unsuitable for joule-heating actuation when uniform contractile actuation is desired. We explore an axially symmetric tubular i-cord knitted actuator as a possible solution. The fabrication process of an i-cord knitted SMA actuator and its electrical, thermal, and mechanics models are presented. After modifying existing models for single-strand SMA wire and adjusting their parameters, the proposed electrical, thermal, and mechanics models were verified with experimental results. |
Publications
2025 |
|
| Coupled Jet Coordination and Physical Arrangement in Salp-Inspired Multi-Robot Swimming (Journal Article) In: Bioinspiration & Biomimetics, vol. 20, iss. RoboTwin, no. 6, pp. 066010, 2025. |
| Bio-inspired valveless pumping for Fontan circulation: Experimental and modeling insights (Conference) Biomedical Engineering Society’s (BMES) Annual Meeting, 2025. |
| Characterizing Robot-Ground Interactions for Autonomous Lunar Construction (Conference) International Symposium on Experimental Robotics (ISER), 2025. |
| TRUSSES - A multi-robot collaborative experimental platform (Conference) International Symposium on Experimental Robotics (ISER), 2025. |
| Liebau Pumping Enables Valveless Soft Swimmer Robot (Conference) International Symposium on Experimental Robotics (ISER), 2025. |
Artistic Non-Inertial Tracer (ANT): an Educational Kit for a 3-Link Origami Slithering Robot (Conference) 2025 ASEE Annual Conference & Exposition, American Society for Engineering Education 2025. | |
| MORF: Magnetic Origami Reprogramming and Folding System for Repeatably Reconfigurable Structures with Fold Angle Control (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2025. |
| Salp-Inspired Bidirectional Jet Propulsion Swimmer with Self-Sensing (Workshop) IEEE International Conference on Robotics and Automation (ICRA), Workshop: 2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention, 2025. |
| Bioinspired Valveless Swimming Through Liebau Pumping: A Soft Robotic Propulsion Strategy (Workshop) IEEE International Conference on Robotics and Automation (ICRA), Workshop: 2nd Unconventional Robots: Rethinking Robotic Systems Beyond Convention, 2025. |
| Effect of Jet Coordination on Underwater Propulsion with the Multi-Robot SALP System (Conference) IEEE 8th International Conference on Soft Robotics (RoboSoft), Lausanne, Switzerland, pp. 1-8, 2025. |
| Leveraging Impedance-Related Properties for Free Self-Sensing in Actuators for Compact Robots (PhD Thesis) 2025. |
| Scout-rover cooperation: Online terrain strength mapping and traversal risk estimation for planetary-analog explorations (Conference) Lunar and Planetary Science Conference (LPSC), 2025. |
2024 |
|
| Origami Robots (Book Chapter) In: Nanayakkara, Thrishantha (Ed.): Handbook on Soft Robotics, Chapter 9, pp. 315-344, Springer Cham, 2024, ISBN: 978-3-031-68619-1. |
| Mechanical Characterization of an Origami-Inspired Multistable Tube for Reconfigurable Implants, (Conference) Biomedical Engineering Society’s (BMES) Annual Meeting, 2024. |
| Algorithmic Design of Kinematic Trees Based on CSC Dubins Planning for Link Shapes (Conference) Workshop on the Algorithmic Foundations of Robotics (WAFR), 2024. |
| Reparametrization of 3D CSC Dubins' Paths Enabling 2D Search (Conference) Workshop on the Algorithmic Foundations of Robotics (WAFR), 2024. |
| Re-programmable Matter by Folding: Magnetically Controlled Origami that Self-Folds, Self-Unfolds, and Self-Reconfigures On-Demand (Conference) 8th International Meeting on Origami in Science, Mathematics, and Education, 2024. |
| Kinegami: Open-source Software for Creating Kinematic Chains from Tubular Origami (Conference) 8th International Meeting on Origami in Science, Mathematics, and Education (8OSME), 2024. |
| Bistable Structures Enable Passive Transitions in Mobile Robots (PhD Thesis) 2024. |
| A low-cost, adaptable system for lift and drag measurement in an educational wind tunnel (Conference) 2024 ASEE Annual Conference and Exposition, 2024. |
| Robogami Reveals the Utility of Slot-Hopper for Co-Design of DOQ’s Body and Behavior (Workshop) ICRA 2024 Workshop on Co-design in Robotics: Theory, Practice, and Challenges, 2024. |
| Bistable Aerial Transformer: A Quadrotor Fixed-Wing Hybrid That Morphs Dynamically Via Passive Soft Mechanism (Journal Article) In: ASME Journal of Mechanisms and Robotics, vol. 16, iss. 7, no. JMR-23-1641, pp. 071016, 2024. |
| TRUSSES: Temporarily, Robots Unite to Surmount Sandy Entrapments, then Separate (Conference) Lunar Surface Innovation Consortium Spring Meeting, 2024. |
| Online Optimization of Soft Manipulator Mechanics via Hierarchical Control (Conference) 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft), 2024. |
| Bio-Inspired Approach to Energetically Efficient Jet Propulsion (Workshop) 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft), Workshop: Soft Robotics Inspired Biology, 2024. |
| Bio-inspired quadrupedal robot with passive paws through algorithmic origami design (Workshop) 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft) Workshop: Soft Robotics Inspired Biology, 2024. |
| Origami-Inspired Bistable Gripper with Self-Sensing Capabilities (Conference) IEEE-RAS International Conference on Soft Robotics (Robosoft), 2024. |
| Design and Characterization of a Pneumatic Tunable-Stiffness Bellows Actuator (Conference) IEEE-RAS International Conference on Soft Robotics (RoboSoft), 2024. |
2023 |
|
| CurveQuad: A centimeter-scale origami quadruped that leverages curved creases to self-fold and crawl with one motor (Conference) IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023. |
| Drag coefficient characterization of the origami magic ball (Proceedings Article) In: ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), pp. DETC2023-117182, 2023. |
| Electronics Design and Verification for Robots With Actuation and Sensing Requirements (Conference) ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), 2023. |
| The Impact of Robotics Expertise on Iterative Robot Design Decisions and Vulnerability to Anchoring Bias (Conference) ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE), 2023. |
| Design and Control of a Tunable-Stiffness Coiled-Spring Actuator (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2023. |
| DOQ: A Dynamic Origami Quadrupedal Robot (Workshop) ICRA Workshop on Origami-based Structures for Designing Soft Robots with New Capabilities, 2023. |
| Kinegami: Algorithmic Design of Compliant Kinematic Chains From Tubular Origami (Journal Article) In: IEEE Transactions on Robotics, vol. 39, iss. 2, pp. 1260-1280, 2023, (Honorable mention for 2023 IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award). |
| A task-to-intelligence mapping: When is embodied intelligence worth designing? (Conference) Embodied Intelligence Conference (EI-2022), 2023. |
2022 |
|
| EvoRobogami: Co-designing with Humans in Evolutionary Robotics Experiments (Conference) Genetic and Evolutionary Computation Conference (GECCO), 2022. |
| Increasing Reliability of Self-Folding of the Origami Hypar (Journal Article) In: ASME Journal of Mechanisms and Robotics, vol. 14, no. 6, pp. 061003, 2022. |
| Forward kinematics and control of a segmented tunable-stiffness 3-D continuum manipulator (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2022. |
| Repeated jumping with the REBOund: Self-righting jumping robot leveraging bistable origami-inspired design (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2022, (* = co-first author). |
| TrussBot: Modeling, design and control of a compliant, helical truss of tetrahedral modules (Conference) IEEE International Conference on Robotics and Automation, 2022, (*=co-first author). |
| Control of a segmented tunable-stiffness 3-D continuum manipulator (Workshop) ICRA Workshop on Compliant Robot Manipulation: Challenges and New Opportunities, 2022. |
2021 |
|
| Tendon-Driven Auxetic Tubular Springs for Resilient Hopping Robots (Journal Article) In: Advanced Intelligent Systems, vol. 4, pp. 2100152, 2021. |
| Programmable Stiffness and Applications of 3D Printed TPU Diamond Lattices (Conference) International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, no. DETC2021-69826, V08AT08A016, 2021. |
| Origami-inspired robot that swims via jet propulsion (Journal Article) In: IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7145-7152, 2021. |
| Reconfiguring Non-Convex Holes in Pivoting Modular Cube Robots (Journal Article) In: IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 6701-6708, 2021. |
| Carbon fiber–aluminum sandwich for micro-aerial vehicles and miniature robots (Journal Article) In: MRS Advances, vol. 6, pp. 477–481, 2021. |
| Soft hybrid aerial vehicle via bistable mechanism (Conference) IEEE International Conference on Robotics and Automation (ICRA), 2021, (*=co-first author, best paper in mechanisms and design). |
| Push On, Push Off: A compliant bistable gripper with mechanical sensing and actuation (Conference) IEEE International Conference on Soft Robotics (RoboSoft), 2021. |
| Fabrication and characterization of I-cord knitted SMA actuators (Conference) IEEE International Conference on Soft Robotics (RoboSoft), 2021. |