Research Focus Areas
Computational Methods for Co-design of Robots
We aim to democratize robotics by making engineering design intuitive and accessible to everyone.
Robot design is a time and skill intensive process requiring years of training and multiple iterations of prototyping and testing.
Unlocking the full potential of ubiquitous and personalized robotics requires new intelligent design tools that support experienced and novice users alike in the design process, from ideation to prototyping to validation stages.
We develop algorithms and tools for the co-design of a robot’s mechanical, electronic, and software components.
Using a combination of computational geometry, mechanics modeling, simulation and optimization techniques, we create computational frameworks for designing, fabricating, and controlling robots that are robust to task, environment, and fabrication uncertainties.
Unlike static objects, robots rely on complex interactions with their surrounding environment, and their performance is therefore very dependent on their physical designs.
We focus on algorithms for design synthesis that provide designs based on evaluated efficiency and robustness tradeoffs.
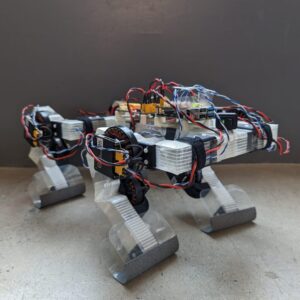
Design for Soft and Origami Robotics
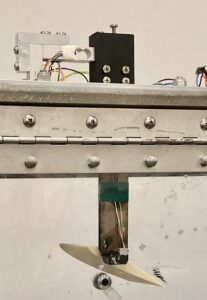
We leverage the inherent mechanics of robots to make them robust and energy-efficient.
Compared to traditional rigid robot designs, compliant robots offer greater flexibility and adaptability, but this comes at a high cost of design and fabrication complexity.
Our strategy is to design new compliant mechanisms with embedded actuation, sensing, and control, enabling robots to adapt their natural response on the fly to suit the needs of a task.
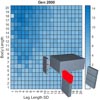
We are particularly interested in lattice and tessellation structures, where small topological and geometric changes produce different anisotropies, snap-through, or buckling behavior.
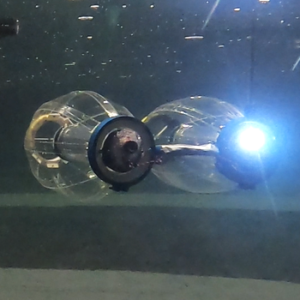
We develop reduced-parameter models for these designs and demonstrate both theoretically and experimentally how these parameters can be optimized for specific applications, including legged locomotion, swimming, and manipulation.


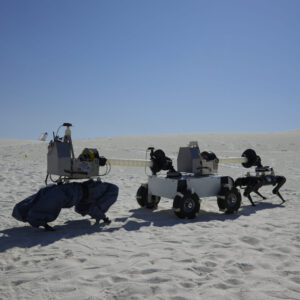
Planning and Control for Distributed Systems
We are interested in distributed algorithms for efficient but safe planning and control in high degree of freedom systems. These include both soft robots, which consist of networks of actuators and sensors distributed throughout their body, and multi-robot collectives.
We are interested in the fundamental theoretical and computational questions underlying consensus and collective task execution.
We leverage techniques from computational geometry and distributed algorithms to answer questions such as: how robots should coordinate in order to improve group agility or locomotion efficiency, what configurations are possible and useful for groups of robots to achieve, and how local sensing and actuation can be used to adapt behaviors in ways that scale with the robot’s degrees of freedom.

Fabrication for Reconfigurable and Deployable Systems
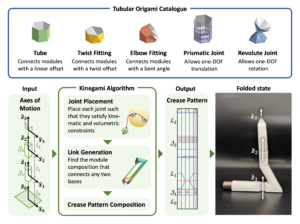
We investigate new ways to use and combine existing digital manufacturing tools such as 3D printing, molding, lamination, and origami-inspired assembly to construct and deploy robots within hours.
We aim for low-weight, low-power, and low-cost devices that can produce complex behaviors with relatively simple actuation requirements.
Taking advantage of in-built compliance, we program behaviors directly into the bodies of robots.
We create new systems for streamlining fabrication by embedding fabrication constraints into computational tools, automatically converting designs into valid plans that can be sent straight to the printer.
We develop reduced-order models to predict the behavior of the fabricated structures and to design robots and devices for particular tasks.
By taking advantage of active materials such as shape memory polymers, we also develop new self-folding and self-assembly processes to turn virtual robot designs into physical designs with minimal human assembly.